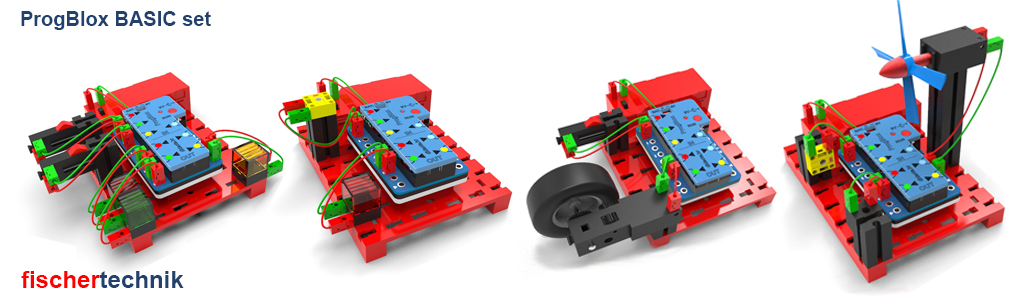
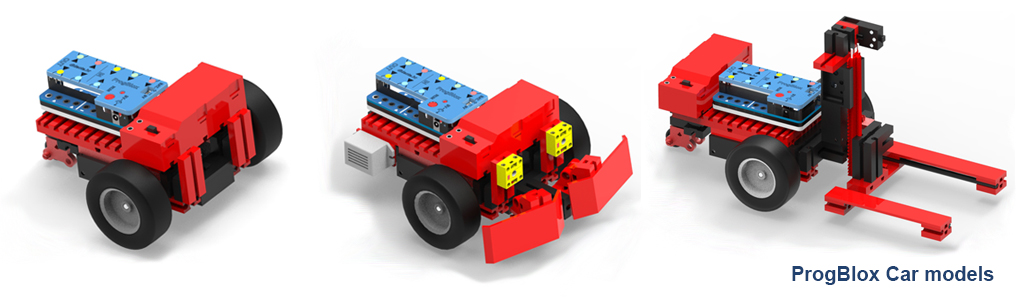
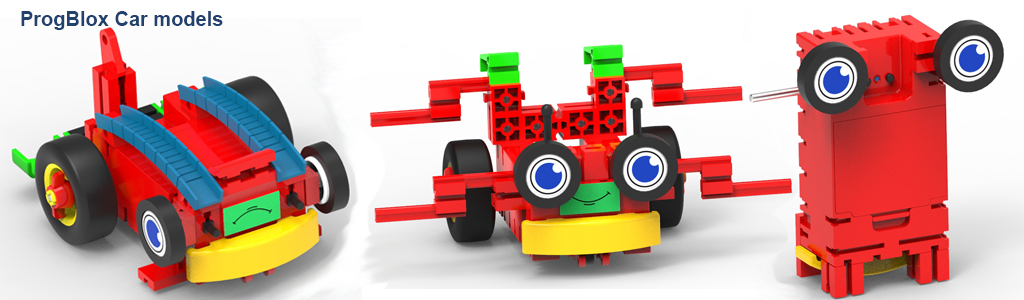
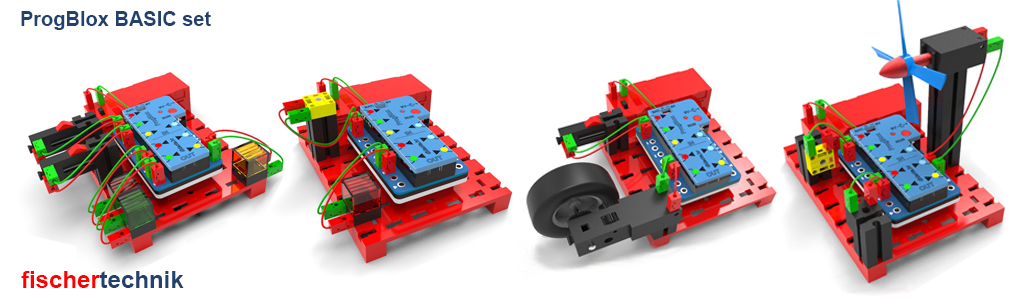
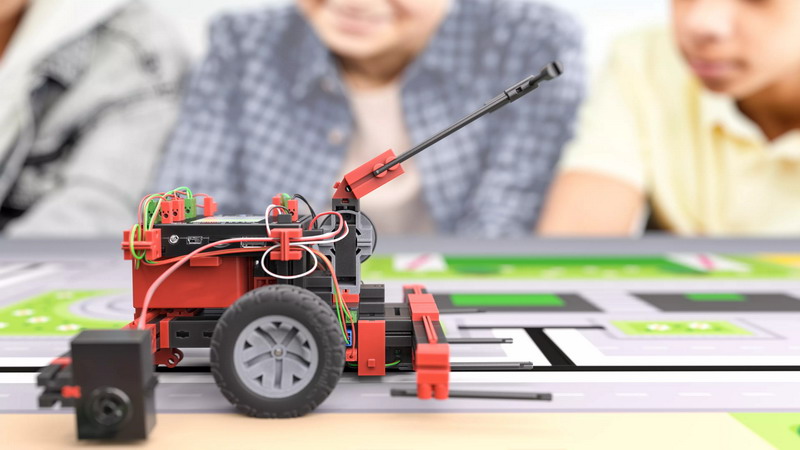
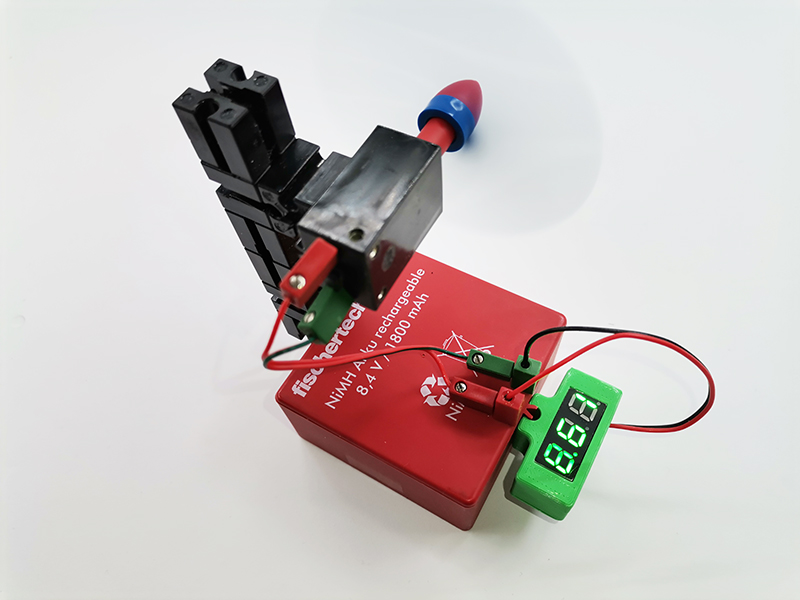
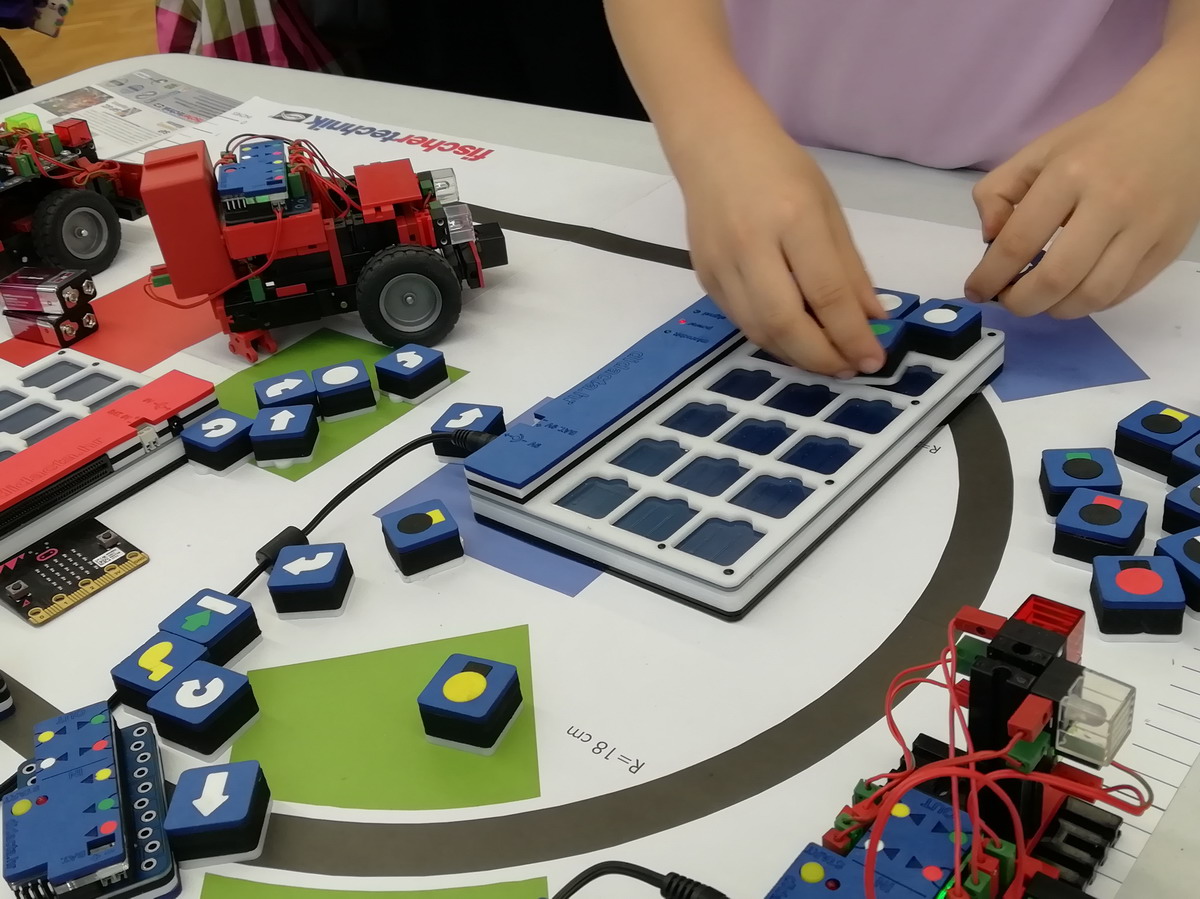
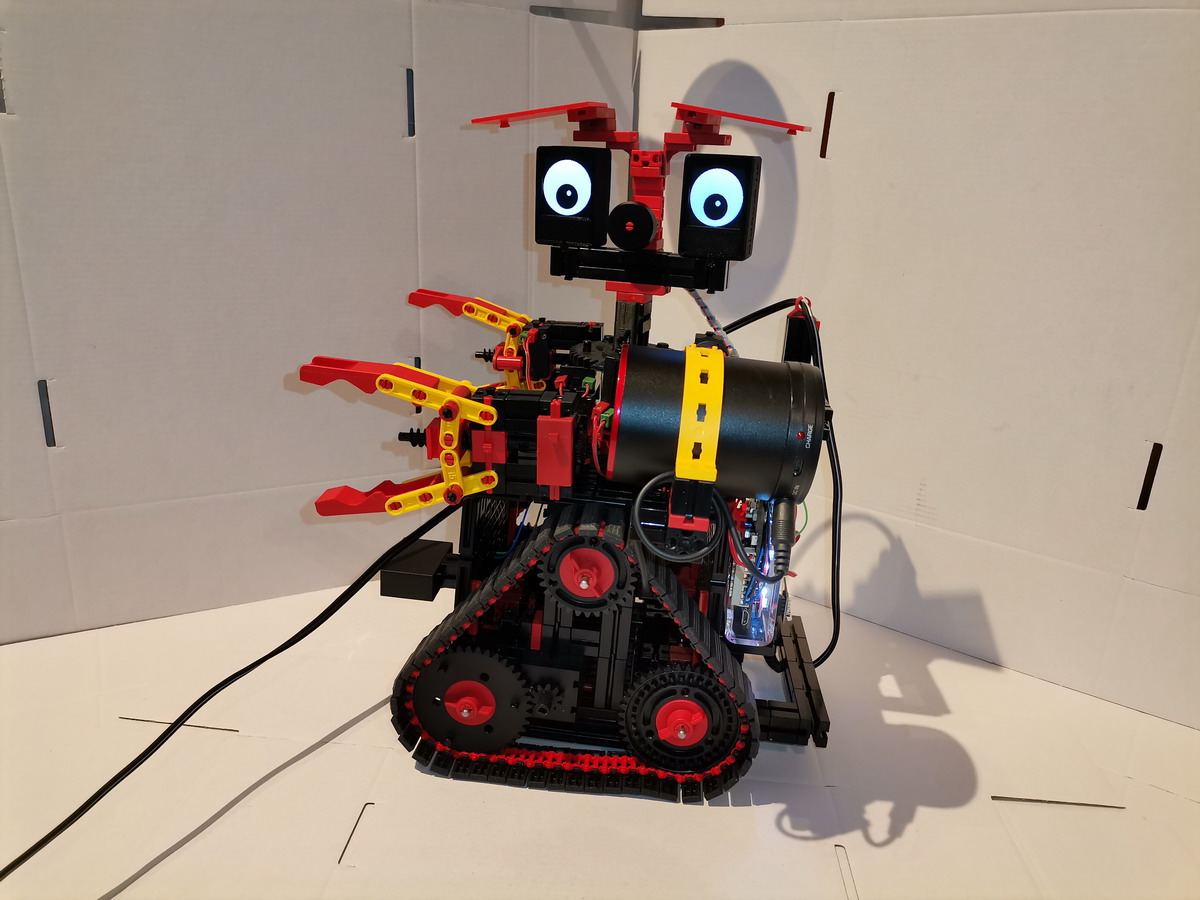
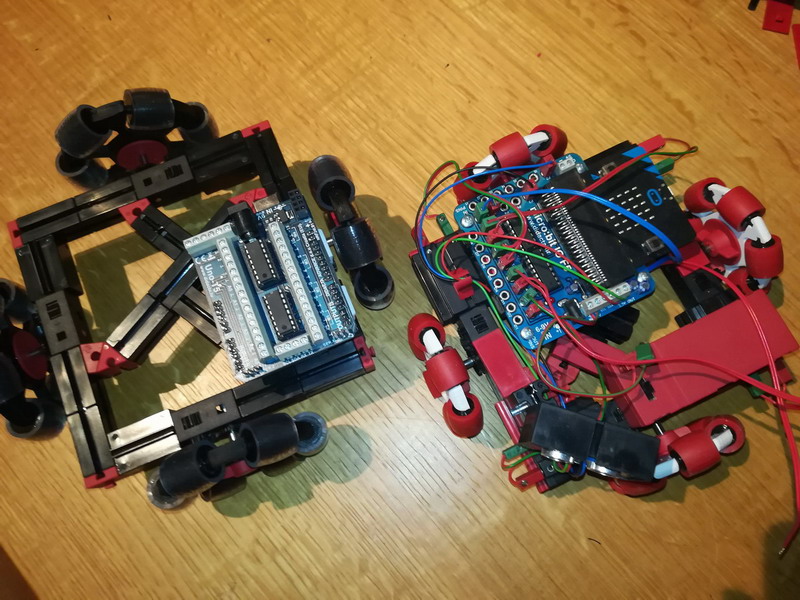
| |  | | Our new project. Learning the basic steps of programming through play and without the use of computers or smartphones. In the pictures and video, you can see the first three "tablets" (test samples) and how the programs for the different models "combine". Programs can be made in two levels. The basic level, which does not require any prior knowledge, and the higher level, which requires basic knowledge of the devices to be controlled (motors, lights, sensors). It is possible to use any DC motor or standard sensor (key, photo, IR, magnetic,...) in model making. The attached pictures are from the MakerFair in Zagreb. |