

| PROGRAMMING SCHOOL | RoboPro Coding - TXT 4.0 |
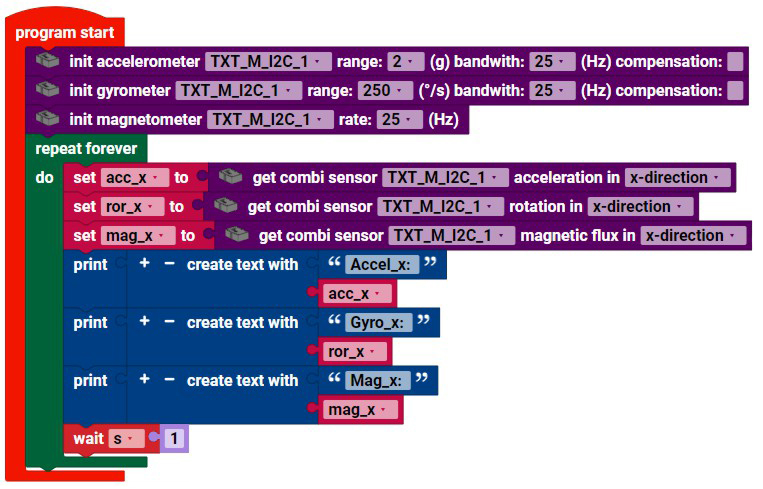
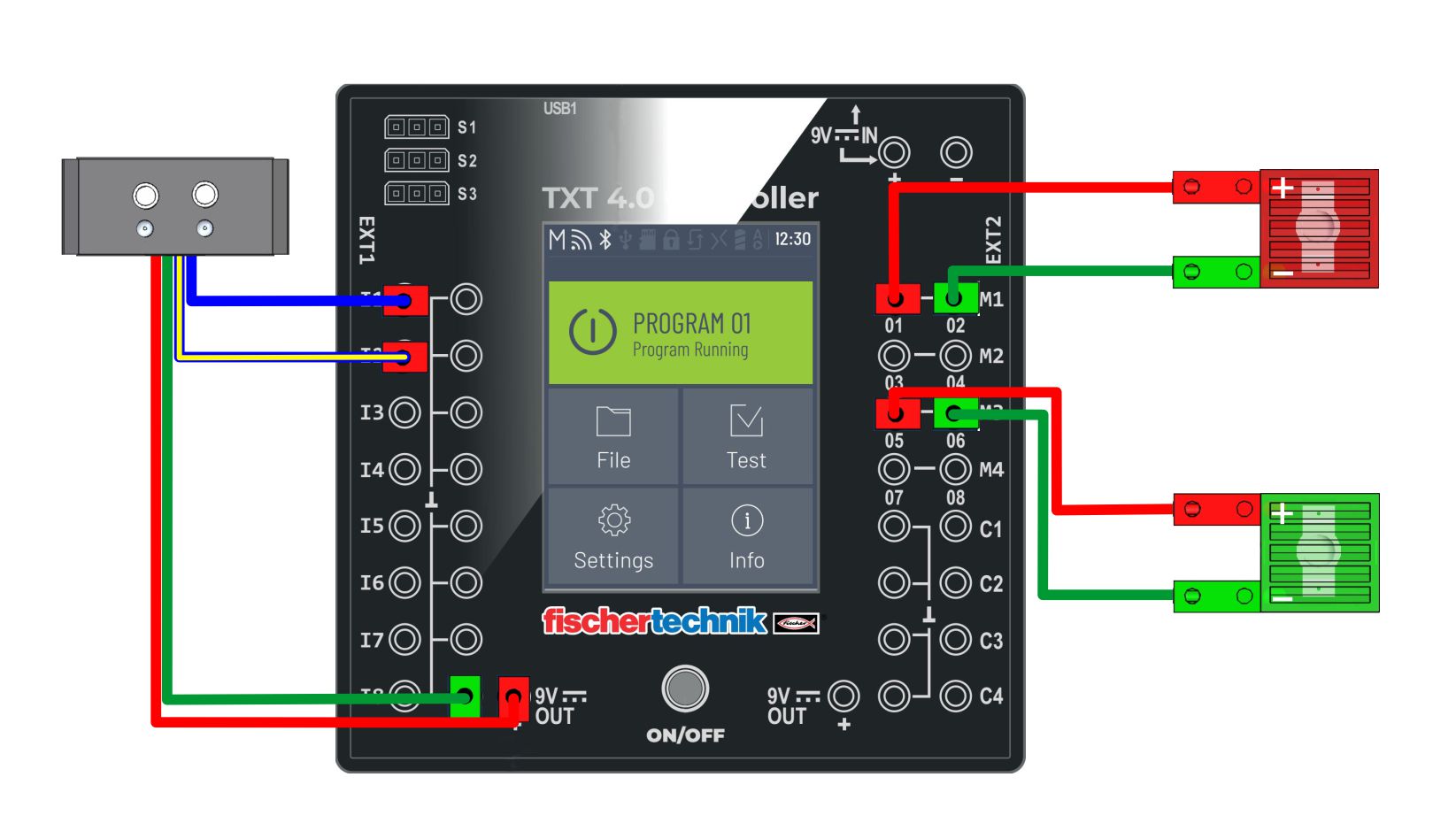
| 1. | Combi sensor 6 Pin | 9. | ULTRASOUND sensor (2.) | ||||||
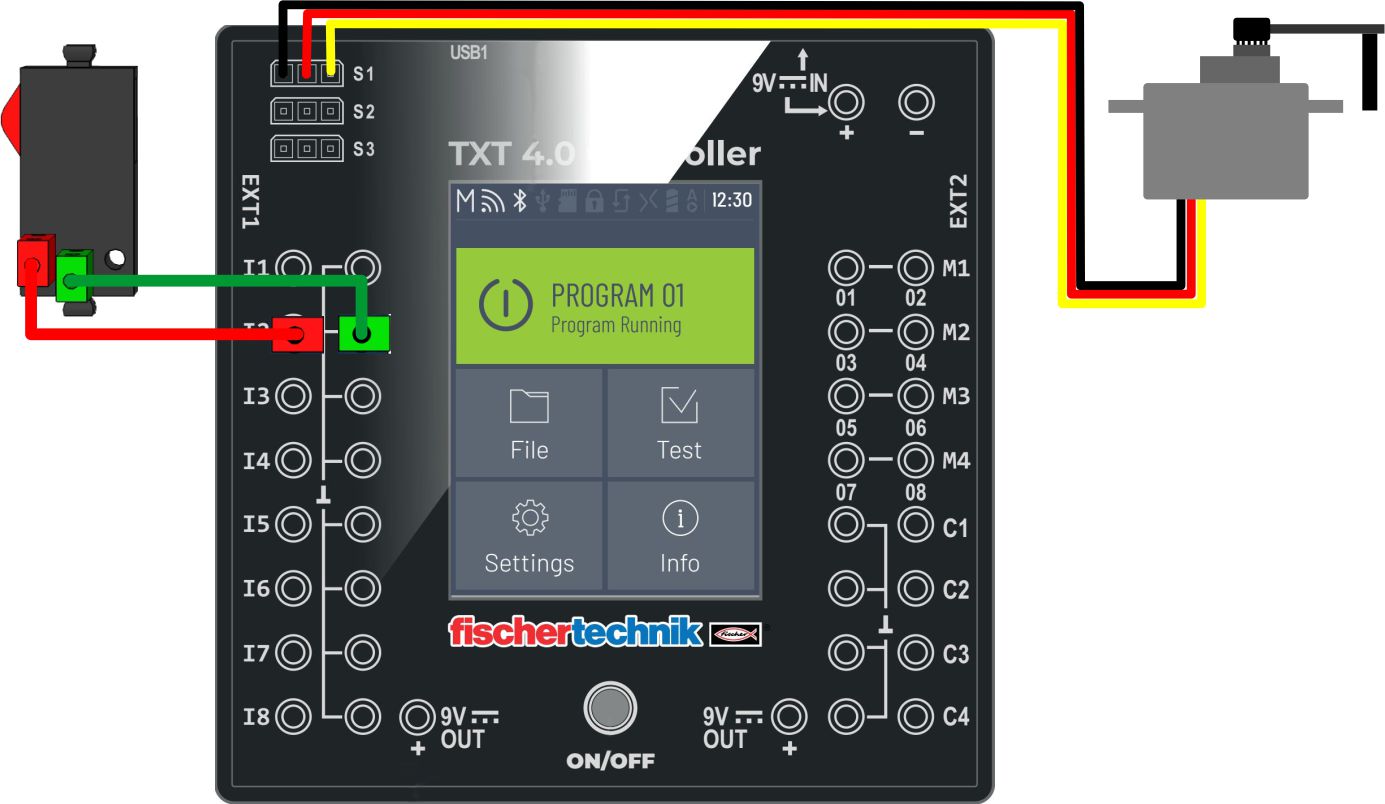
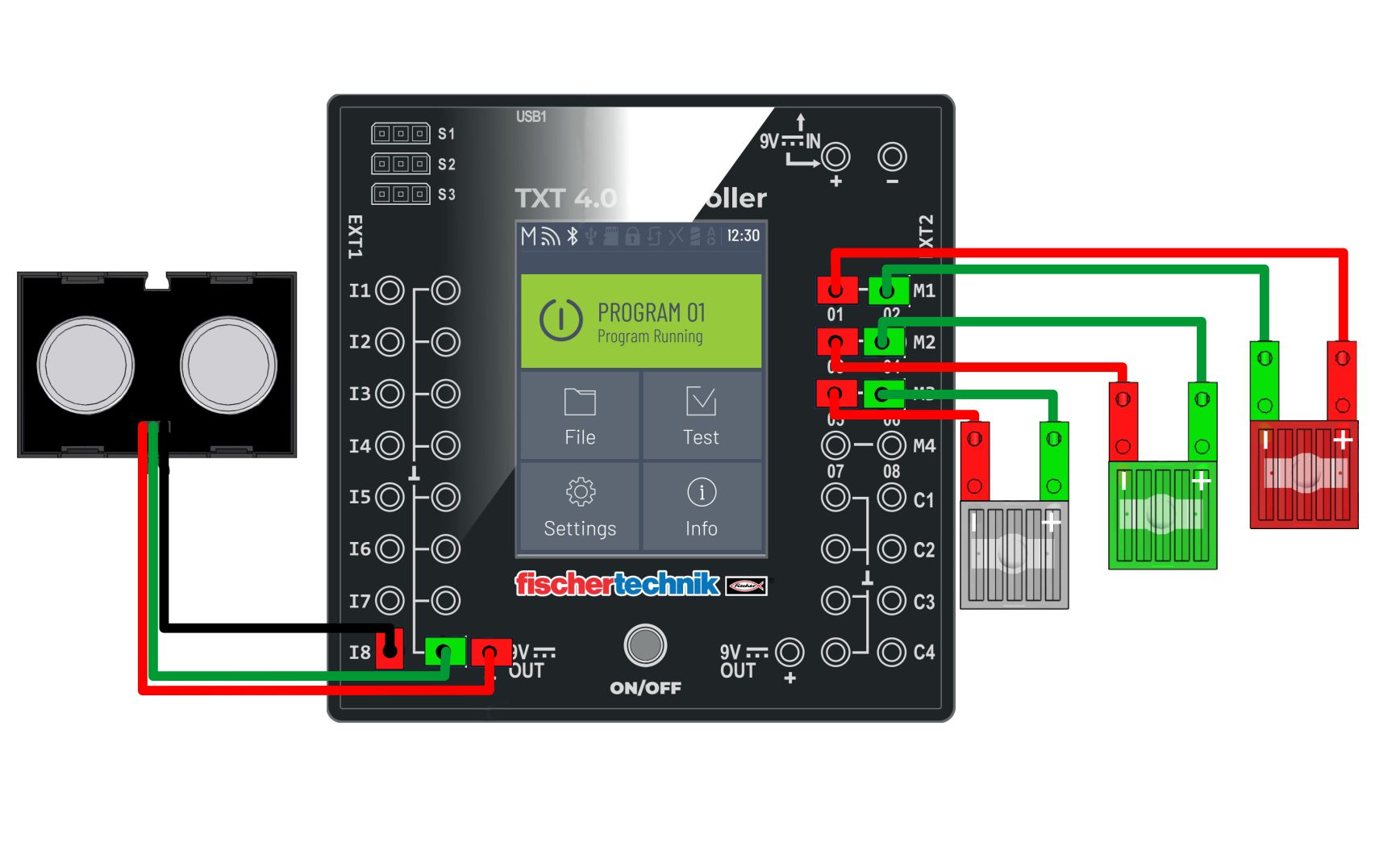
| 2. | SERVO MOTOR | 10. | ULTRASOUND sensor (1.) | ||||||
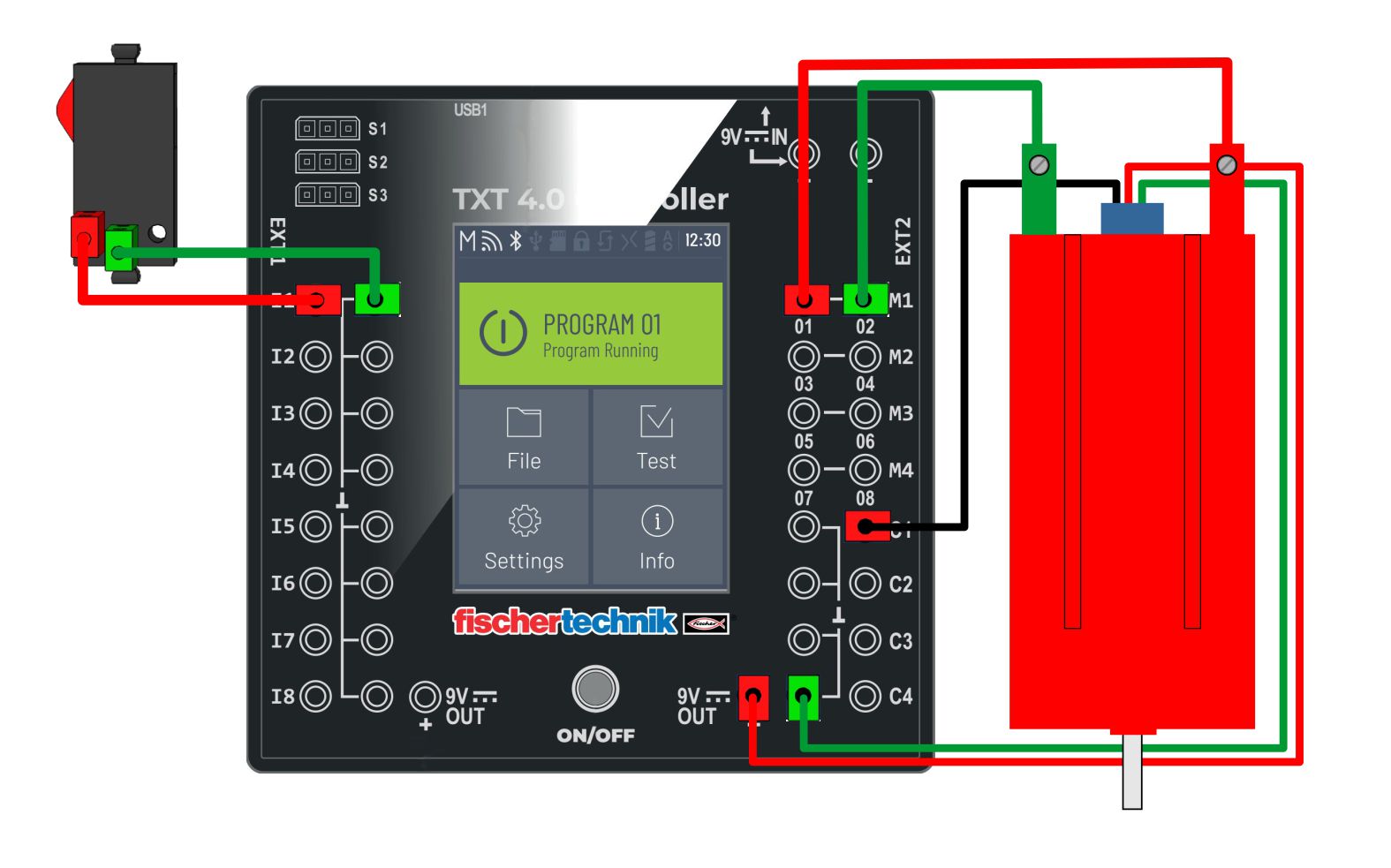
| 3. | ENKODER motor | 11. | IR sensor | ||||||
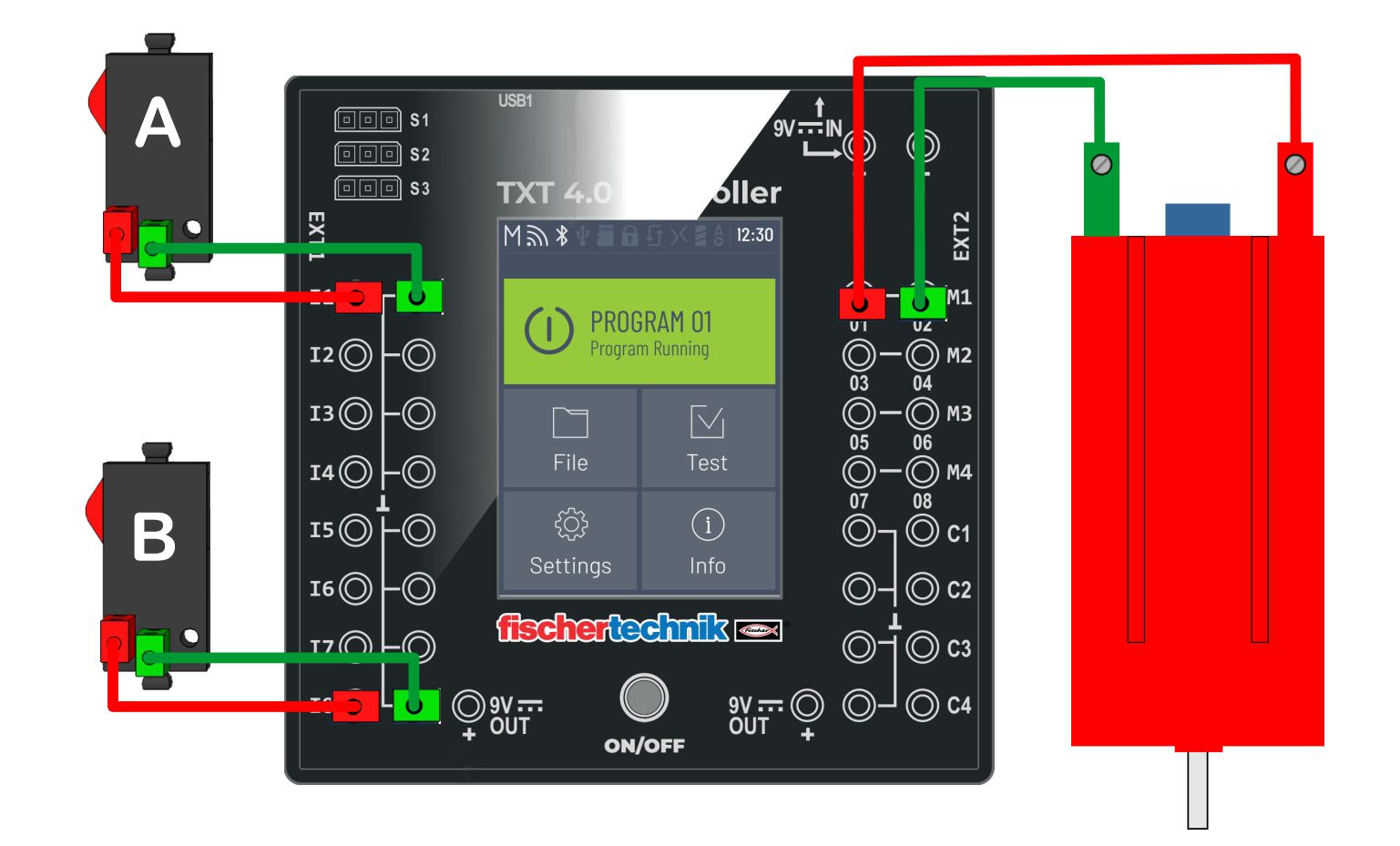
| 4. | MOTOR - impulse gear | 12. | PHOTO resistor (analog) | ||||||
| 5. | MOTOR speed control | 13. | PHOTO transistor | ||||||
| 6. | MOTOR control with switches | 14. | The LED lights up via a switch | ||||||
| 7. | MAGNETIC sensor | 15. | Analog LED control | ||||||
| 8. | COLOR sensor | 16. | Turn on the digital LED | ||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
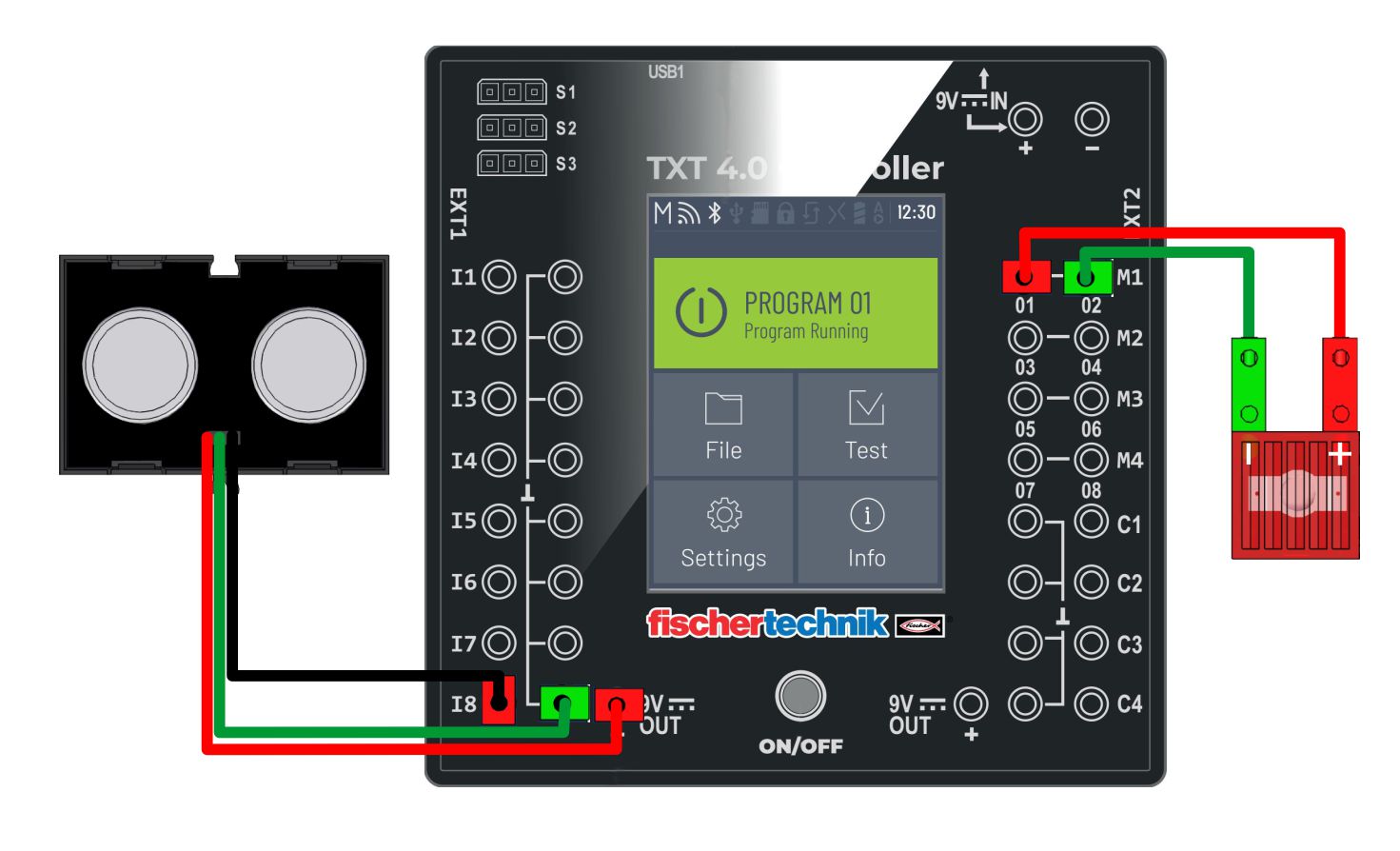
{kind=link}