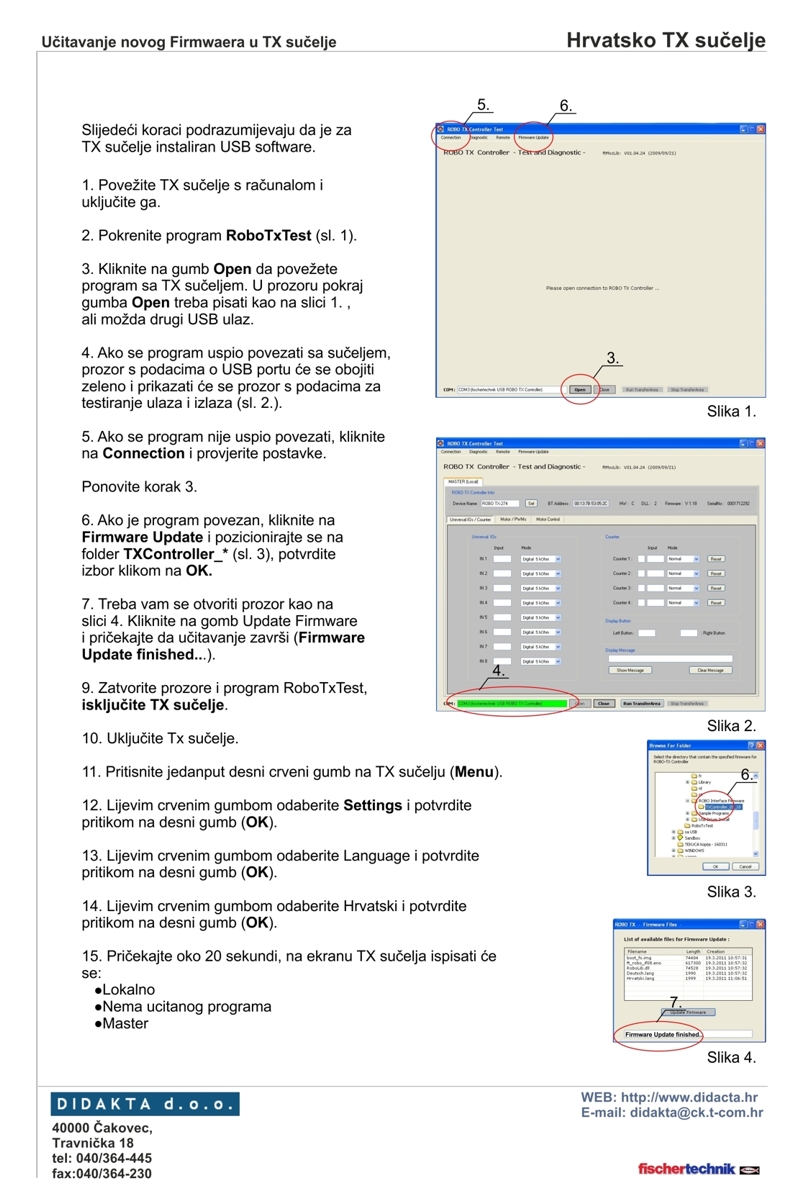
| Download the packaged file and unzip it into a some folder. Open the pdf instructions that are contained in the package and follow the steps as instructed. | | | HR_Firmware.rar | |
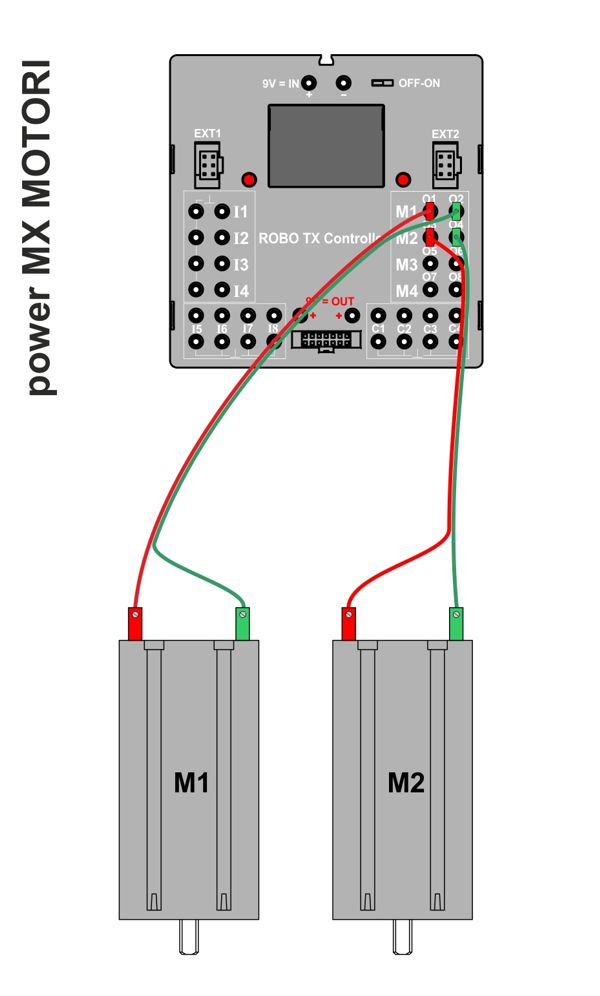
| | Connecting the XM motor to the TX / TXT interface |
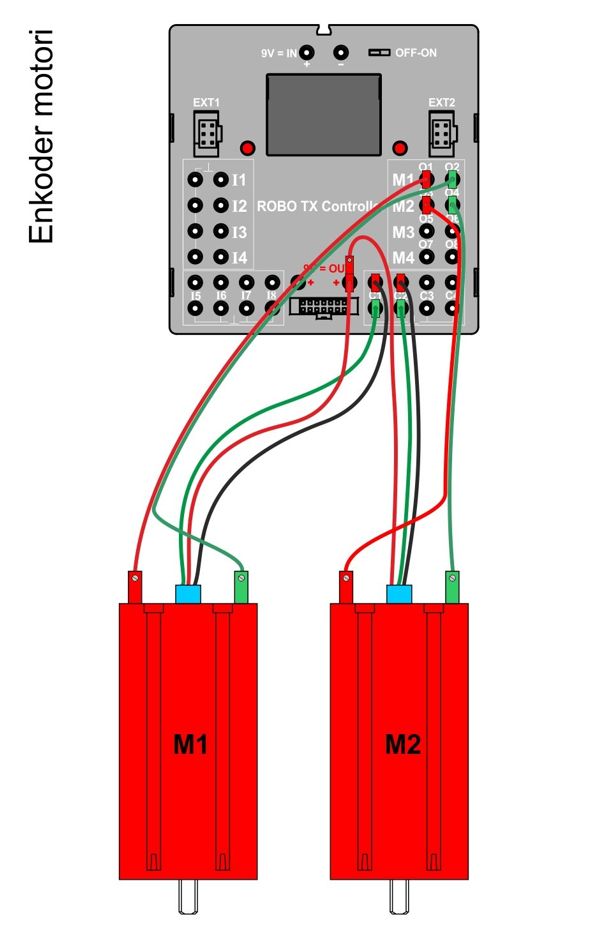
| | Connecting the ENKODER motor to the TX Interface |
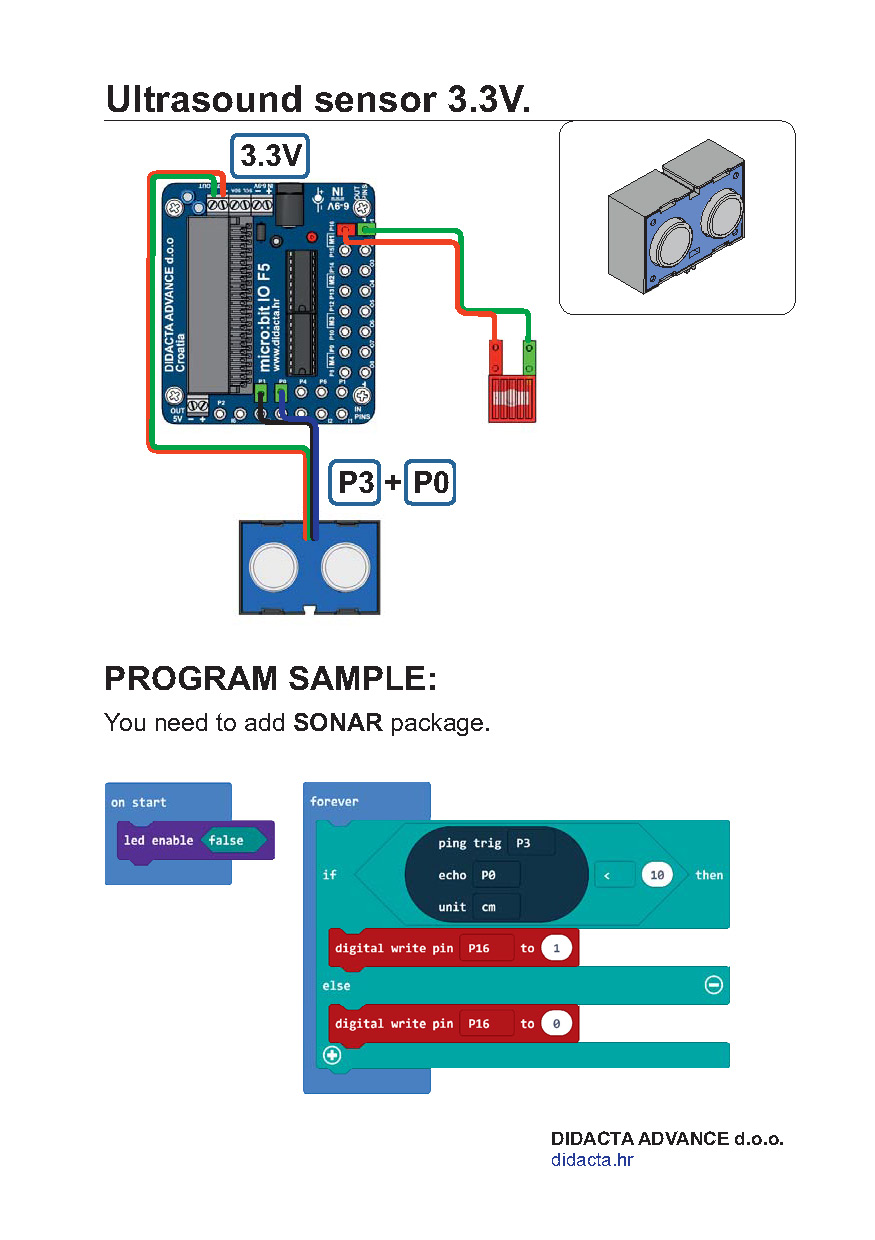
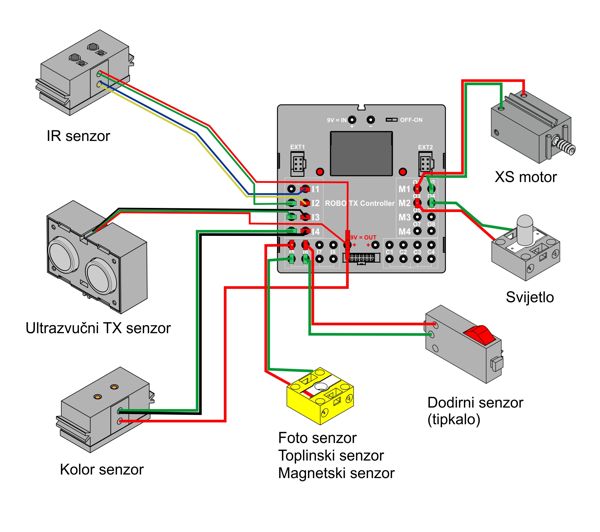
| | Connecting all sensors to the ROBO TX interface |
| |  |
|
|
|