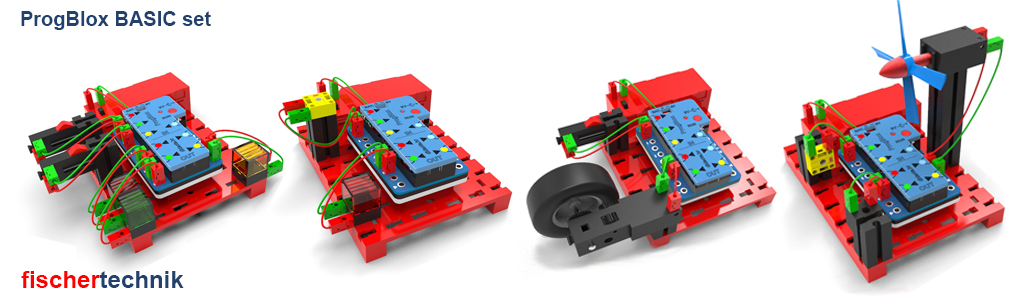
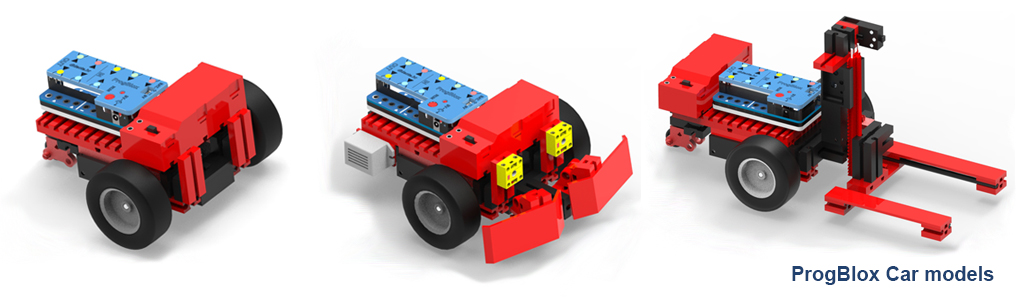
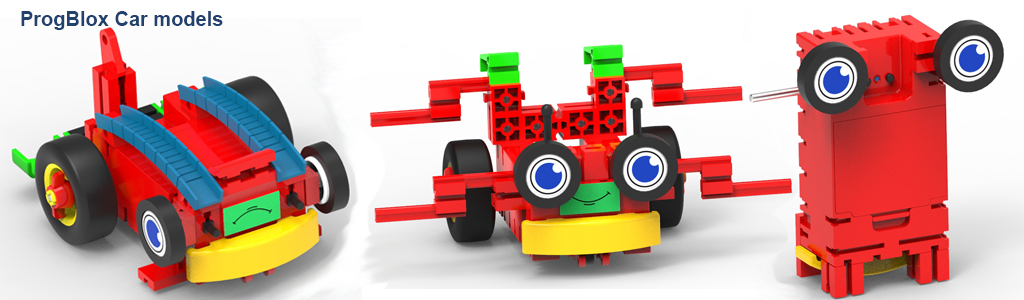
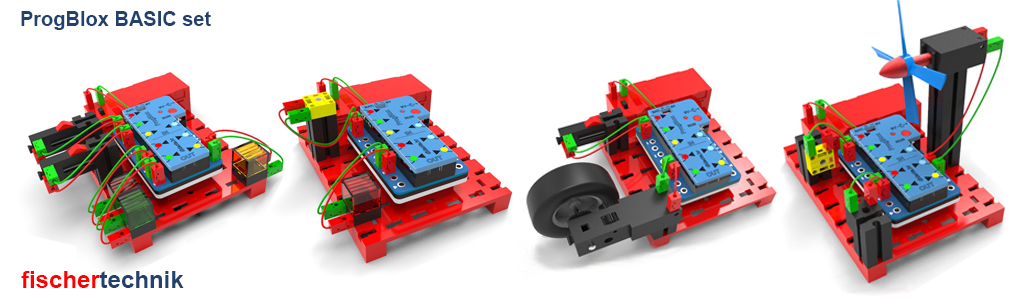
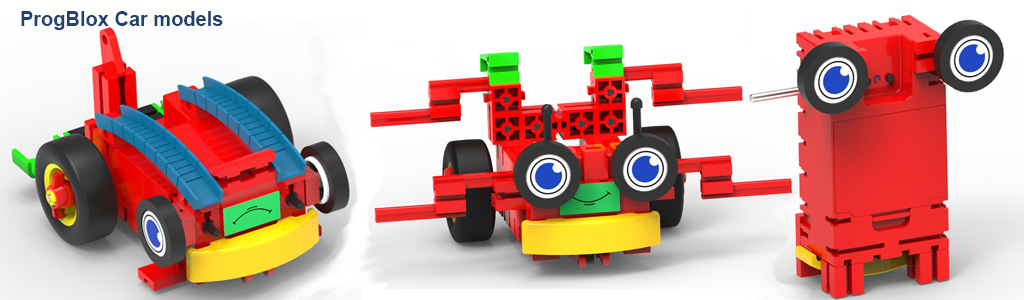
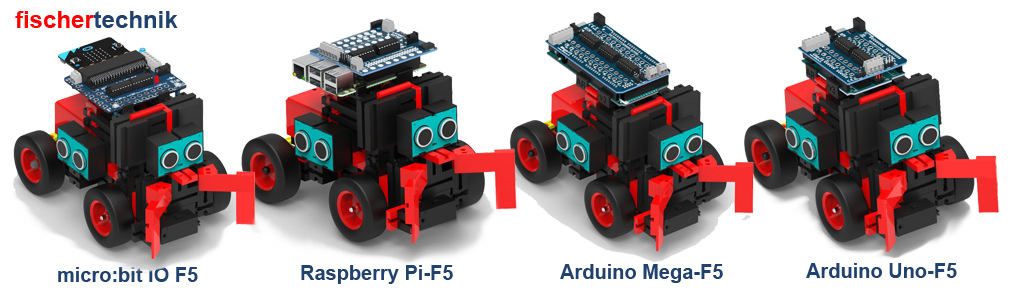
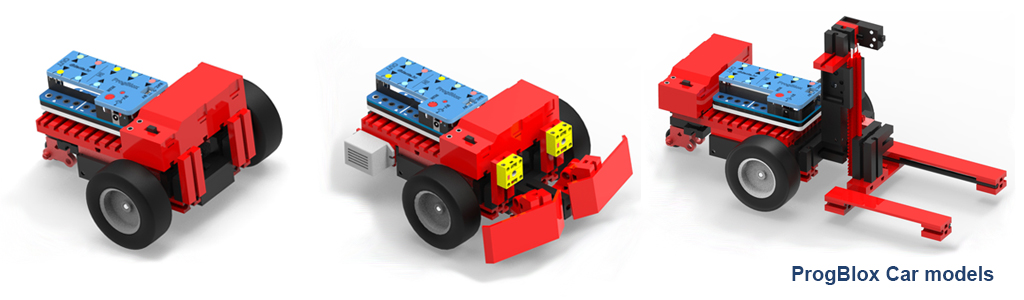
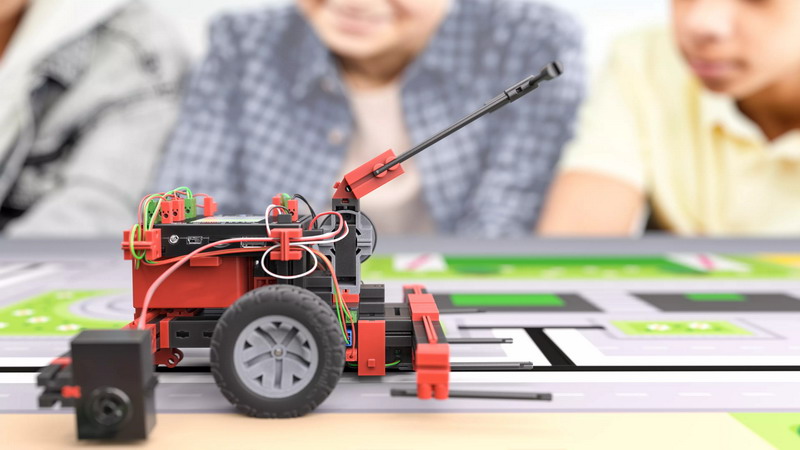
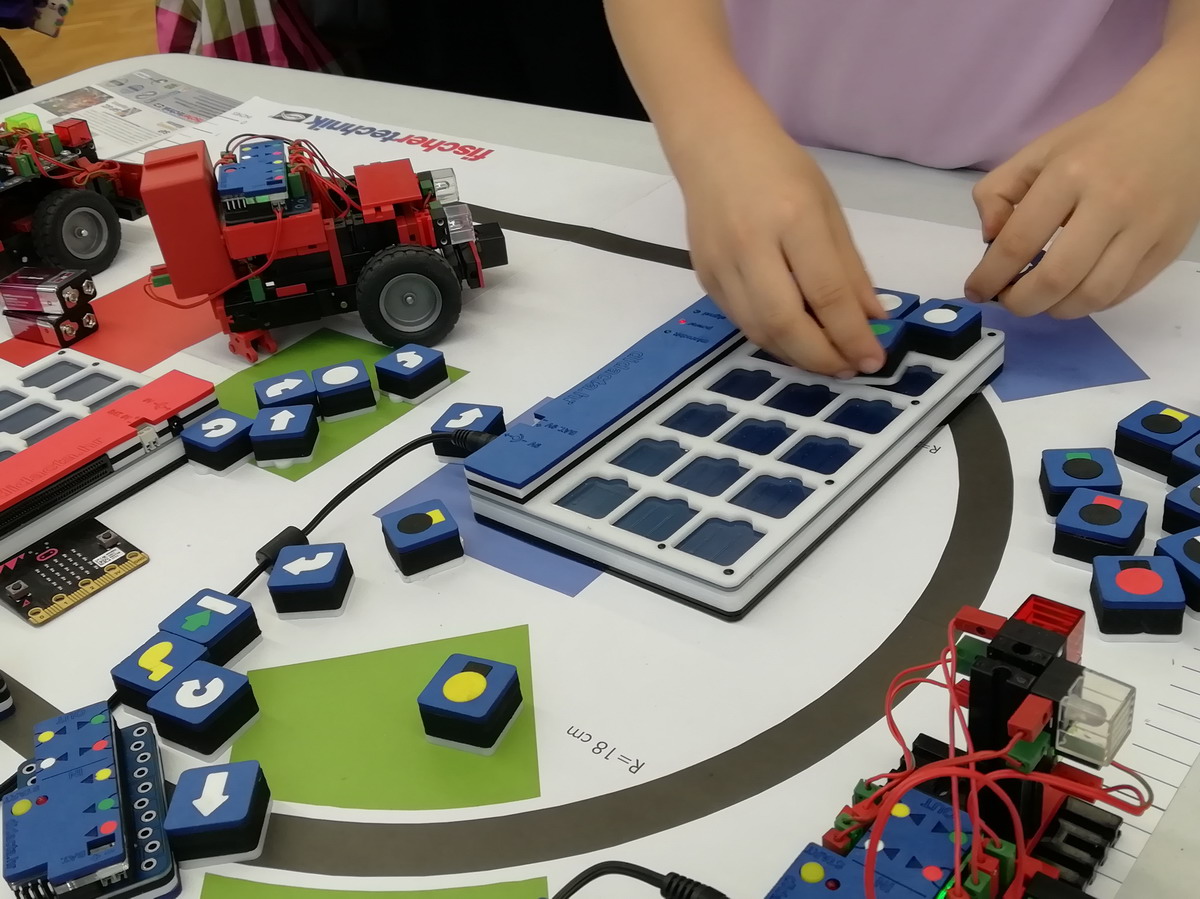
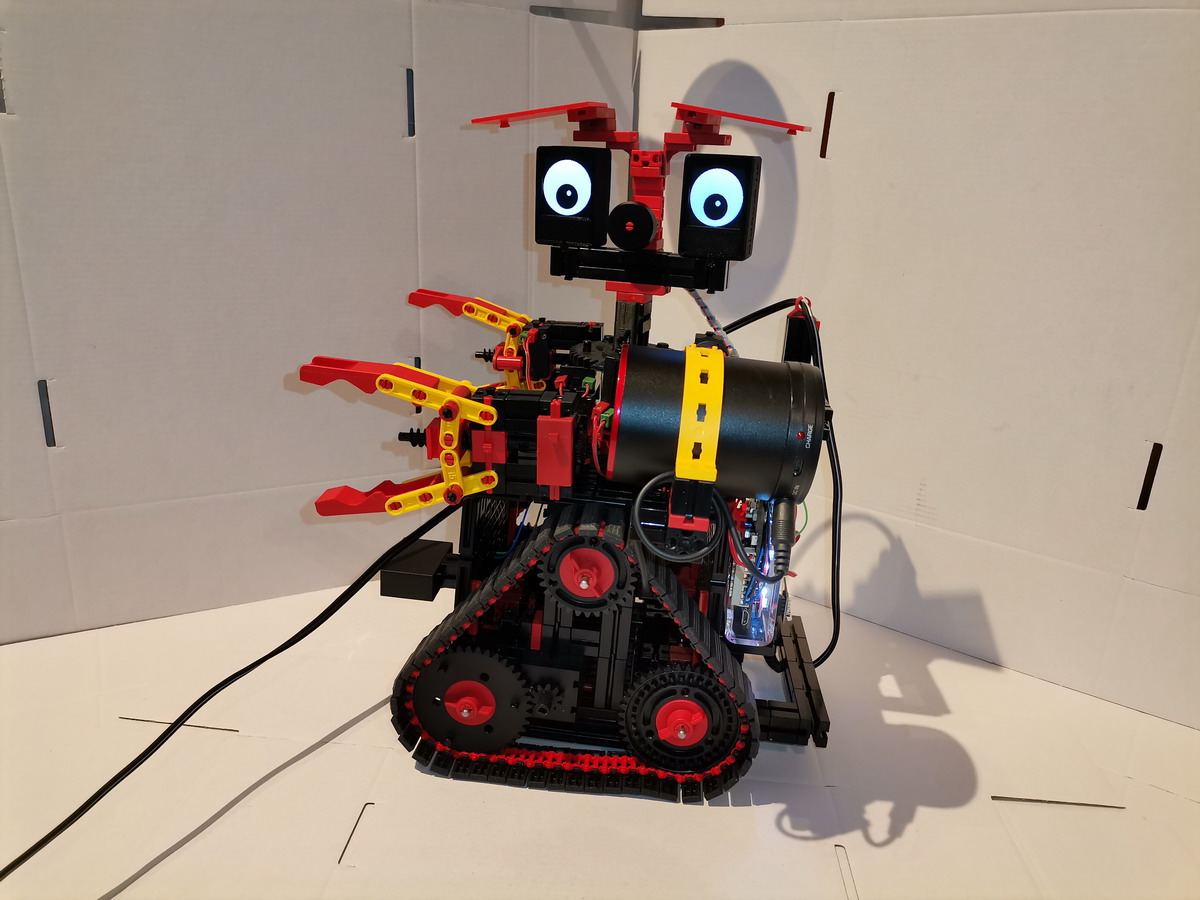
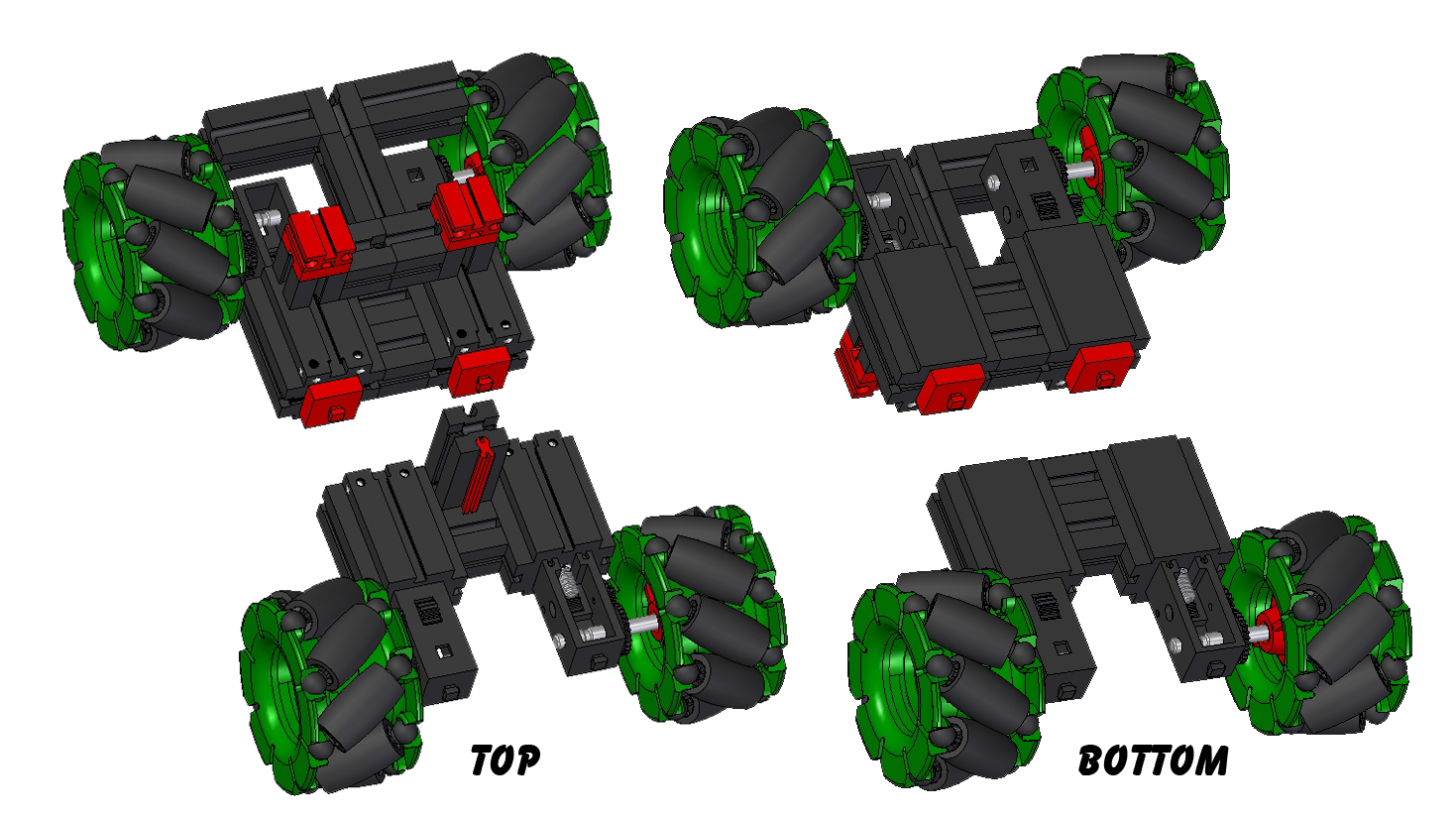
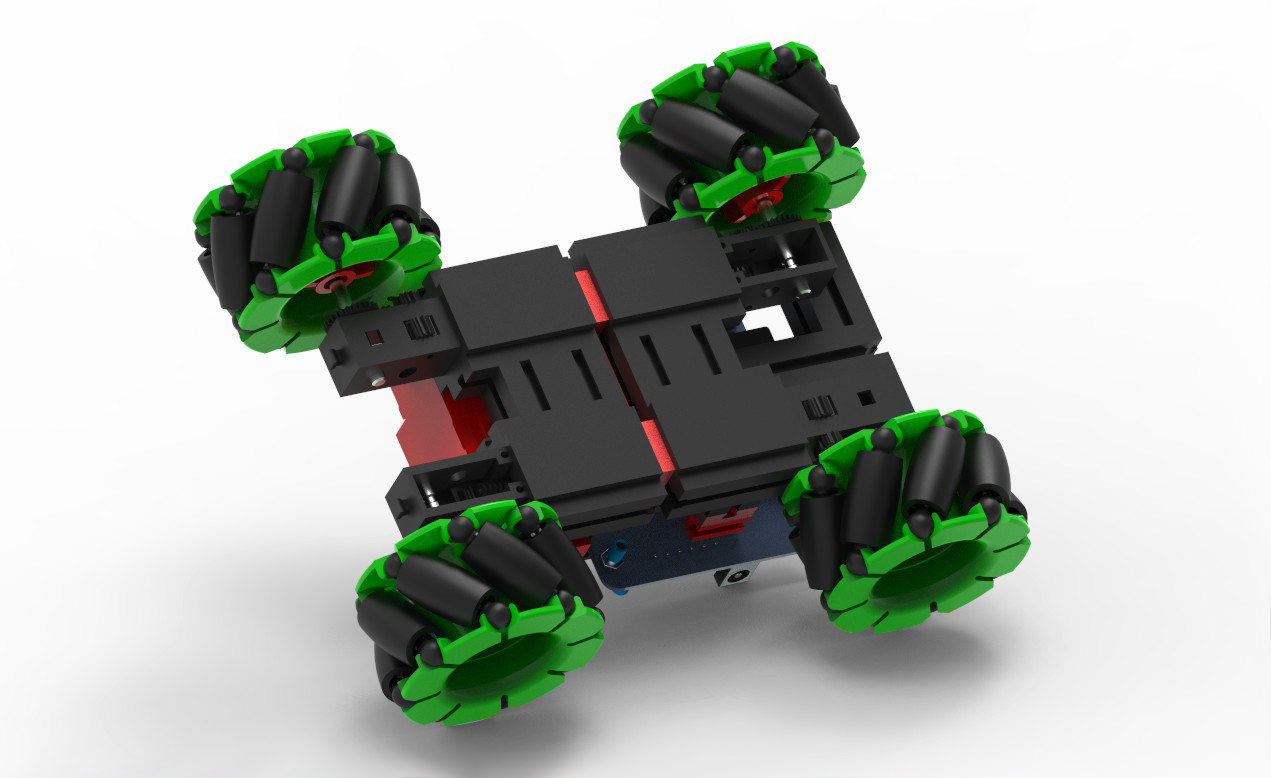
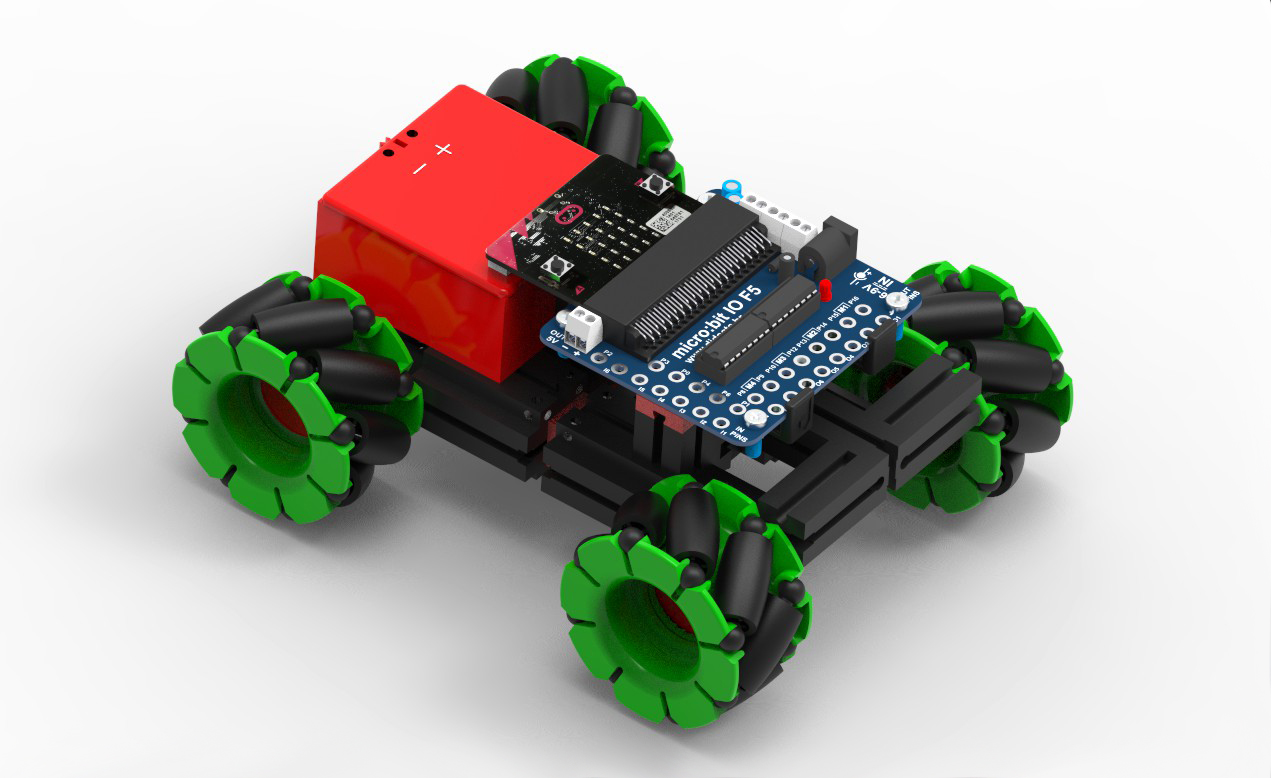
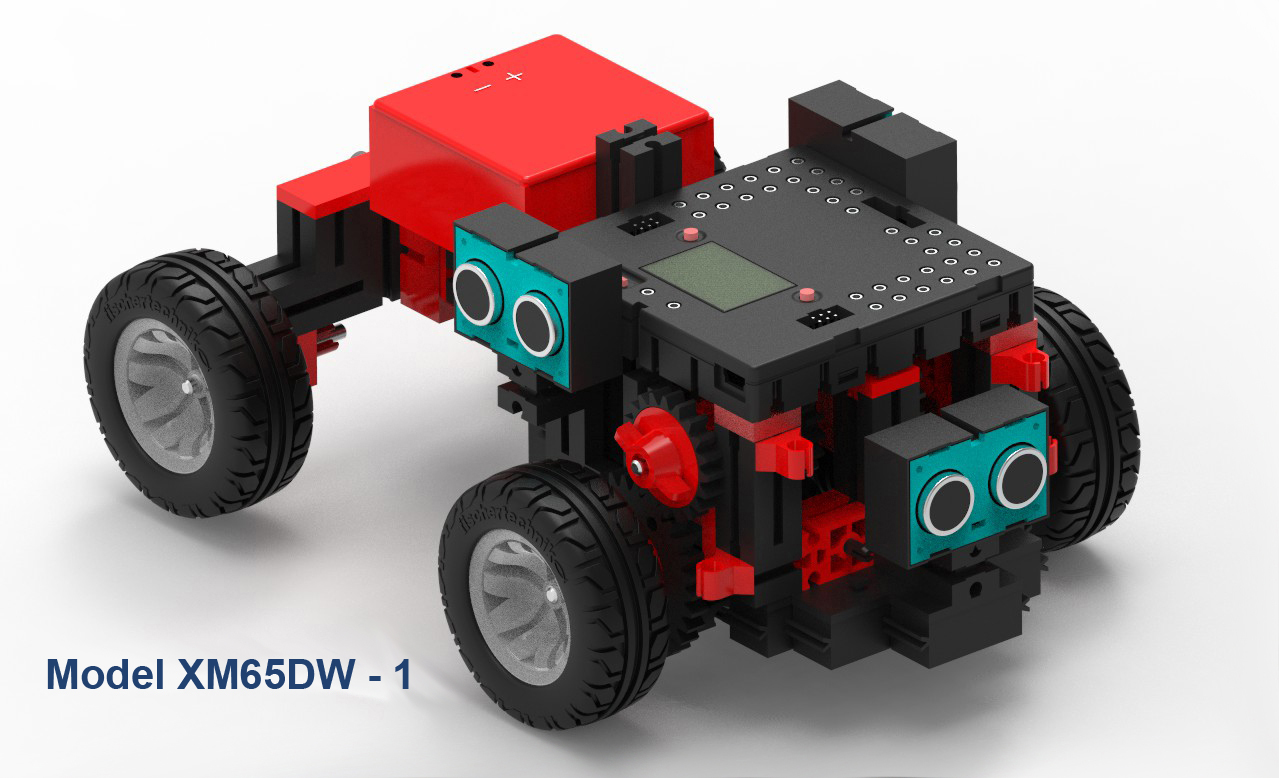
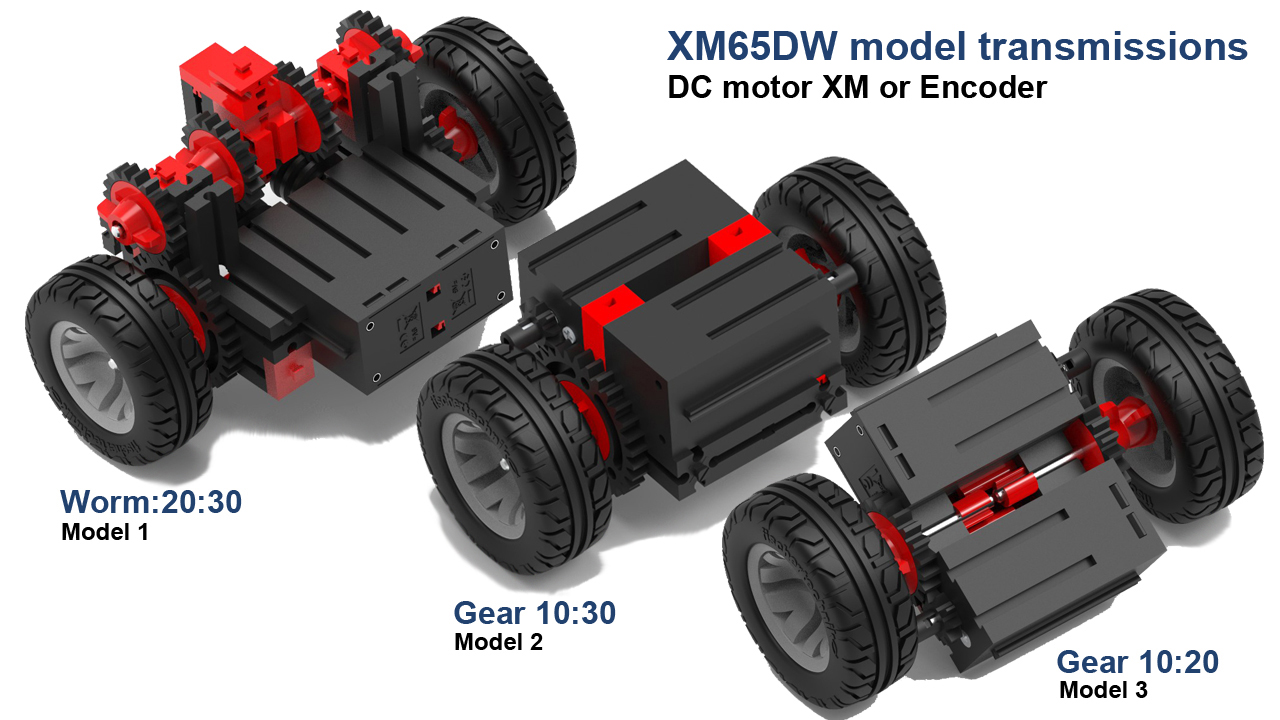
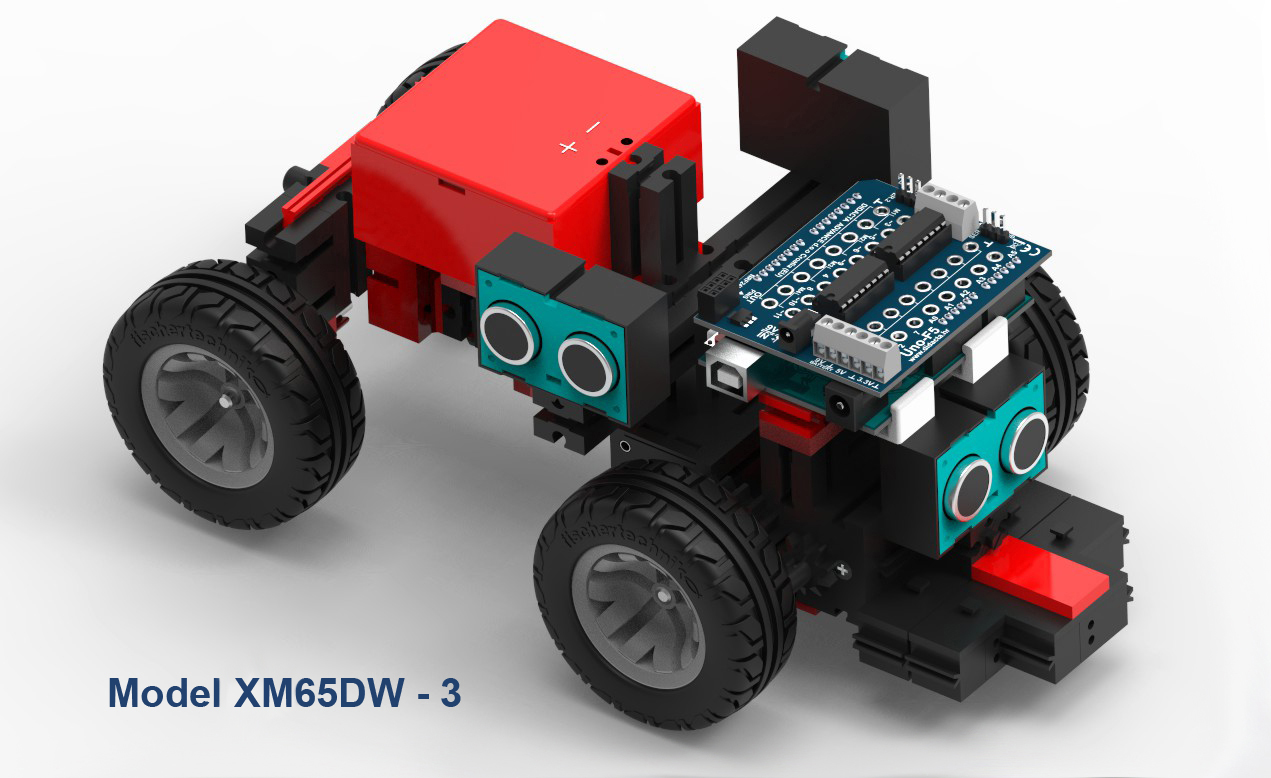
| |  | | Naš novi projekt. Učenje osnovnih koraka programiranja kroz igru i bez upotrebe računala ili pametnih telefona. Na slikama i videu se mogu vidjeti prva tri "tableta" (testni primjerci) i kako se "slažu" programi za različite modele. Mogu se raditi programi u dvije razine. Osnovna razina, koja ne zahtjeva nikakvo predznanje i viša razina koja zahtjeva osnovno poznavanje uređaja koji se žele kontrolirati (motora, svijetla, senzora). U izradi modela moguće je koristiti bilo koji DC motor ili standardni senzor ( tipkalo, foto, IR, magnetski,...). Slike u prilogu su s MakerFaira u Zagrebu. |