| ŠKOLA PROGRAMIRANJA | Raspberry Pi-F5 / T5 |
| 1. | KAMERA - LED KONTROLA (OPEN CV) | 13. | IR SENZOR - ANALOGNO | ||||||
| 2. | ENKODER MOTOR - POLUKORAK - PRECIZNIJE | 14. | IR SENZOR - DIGITALNO | ||||||
| 3. | ENKODER MOTOR - KORAK - MANJE PRECIZNO | 15. | MOTOR - KONTROLA BRZINE OKRETAJA (ANALOGNO) | ||||||
| 4. | TX - RX KOMUNIKACIJA | 16. | MOTOR TIPKALIMA - OKRETAJI MOTORA U OBE STRANE (DIGITALNO) | ||||||
| 5. | I2C KOMUNIKACIJA | 17. | MOTOR TIPKALOM - OKRETAJI MOTORA U JEDNU STRANU (DIGITALNO) | ||||||
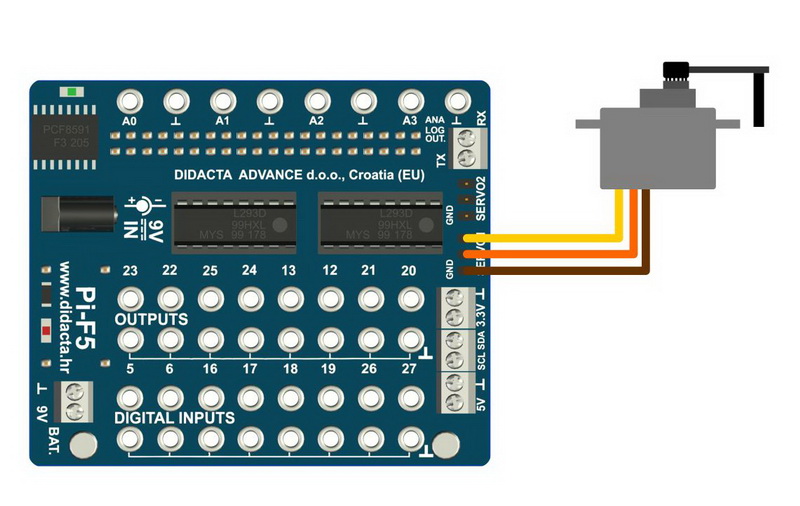
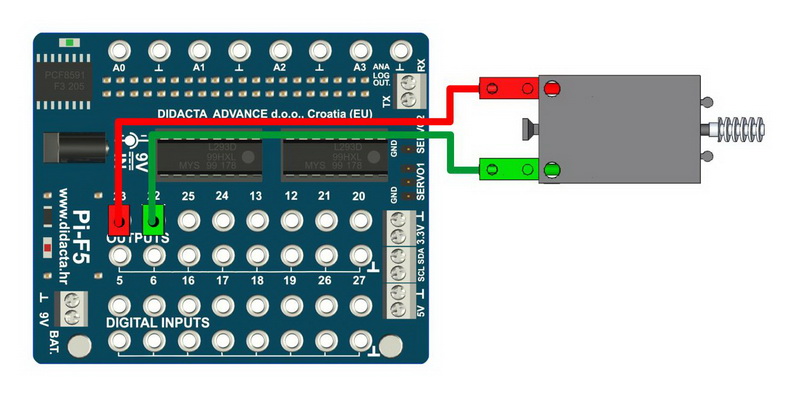
| 6. | SERVO MOTOR | 18. | MOTOR (DIGITALNO) | ||||||
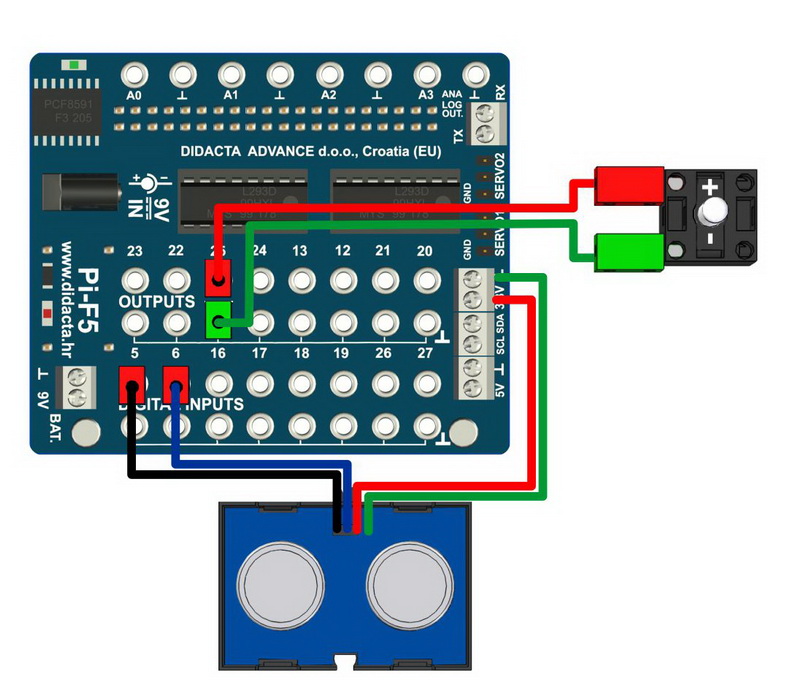
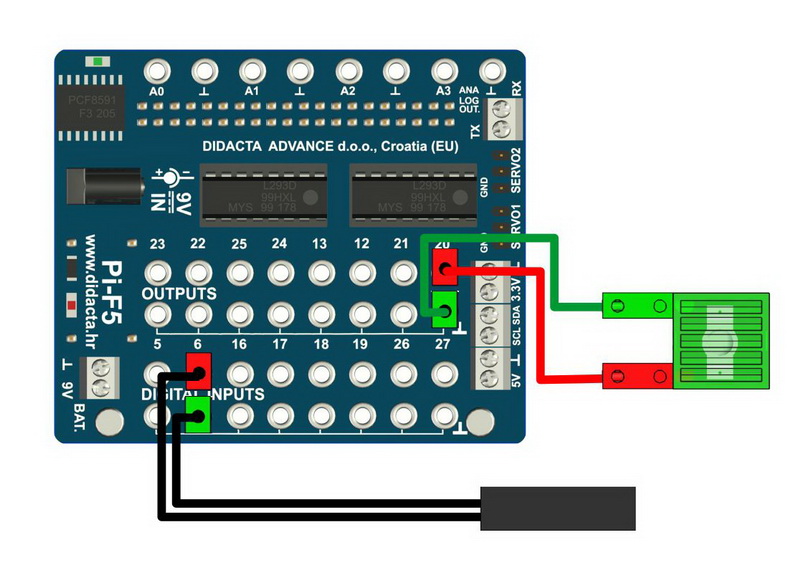
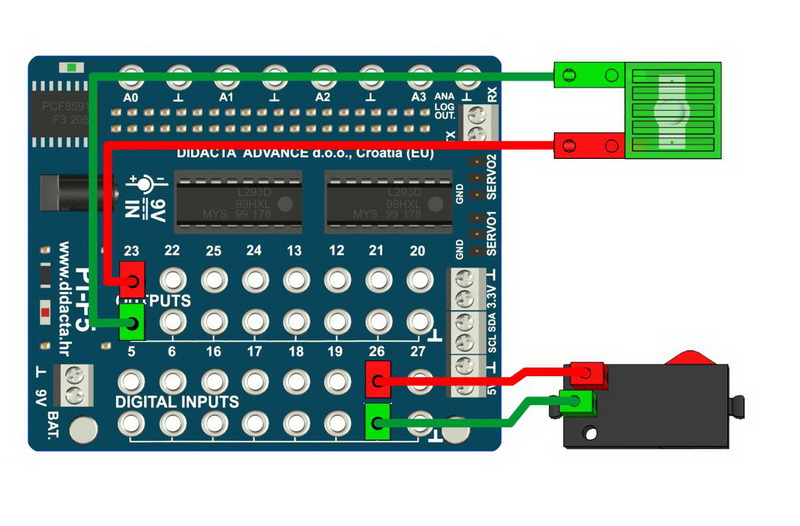
| 7. | ULTRAZVUČNI SENZOR - ANALOGNO | 19. | FOTO SENZOR - LED SVIJETLO (ANALOGNO) | ||||||
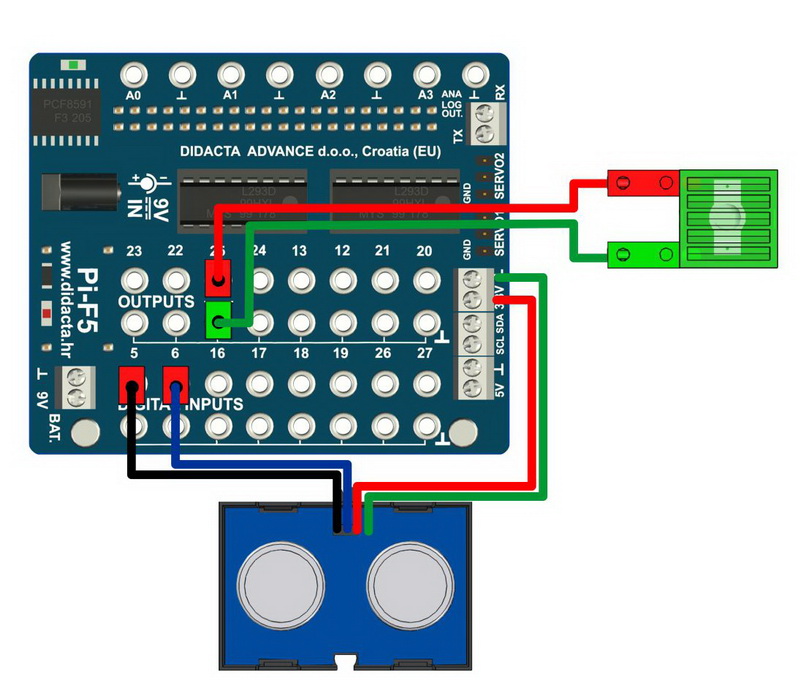
| 8. | ULTRAZVUČNI SENZOR - DIGITALNO | 20. | FOTO SENZOR - LED SVIJETLO (DIGITALNO) | ||||||
| 9. | COLOR SENZOR - CRNA CRTA | 21. | LED SVIJETLO TIPKALOM (ANALOGNO) | ||||||
| 10. | COLOR SENZOR - BOJE | 22. | LED SVIJETLO (ANALOGNO) | ||||||
| 11. | MAGNETSKI SENZOR - DIGITALNO | 23. | LED SVIJETLO TIPKALOM (DIGITALNO) | ||||||
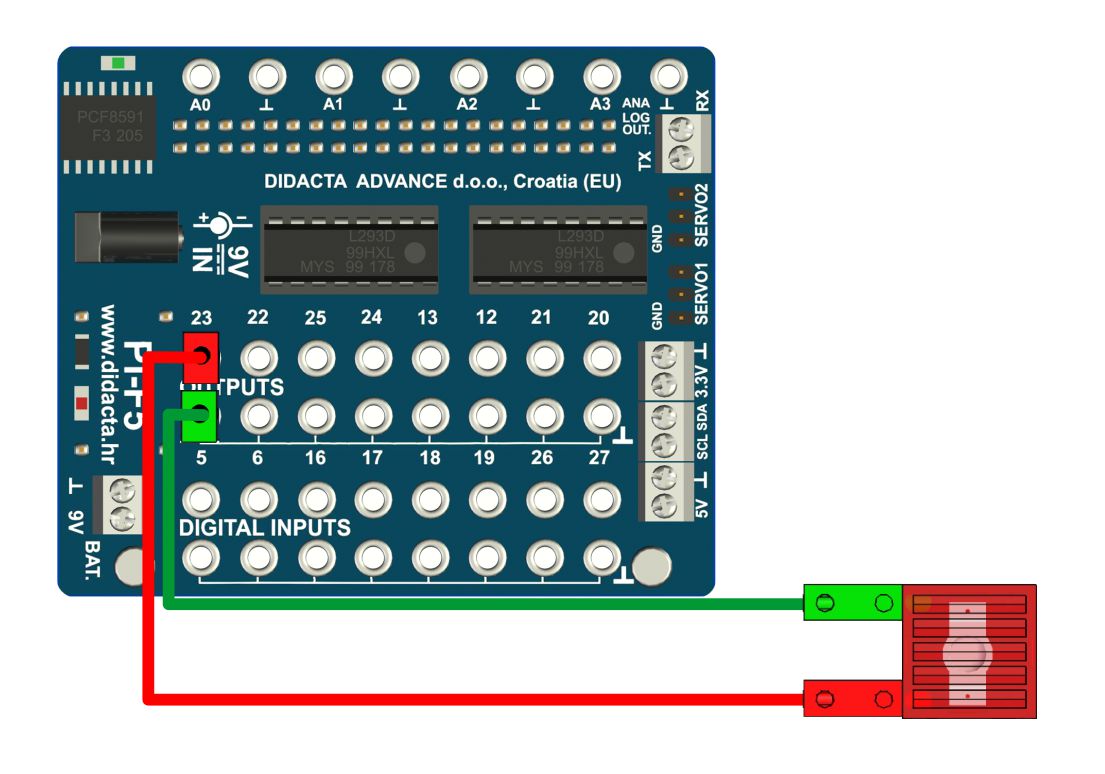
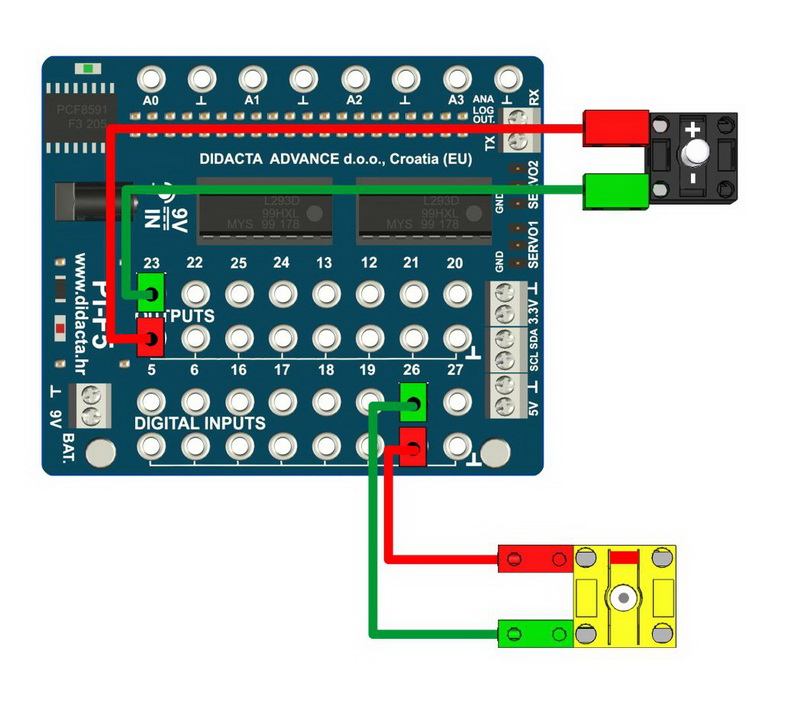
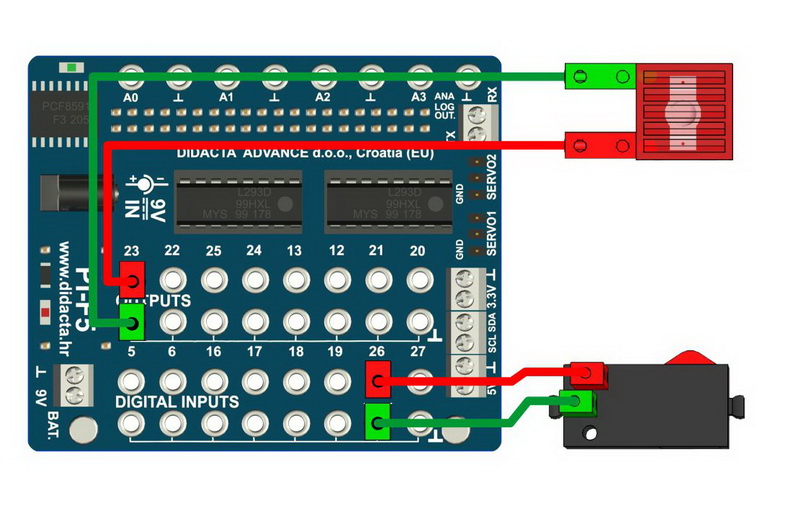
| 12. | TOPLINSKI SENZOR - ANALOGNO | 24. | LED SVIJETLO (DIGITALNO) | ||||||
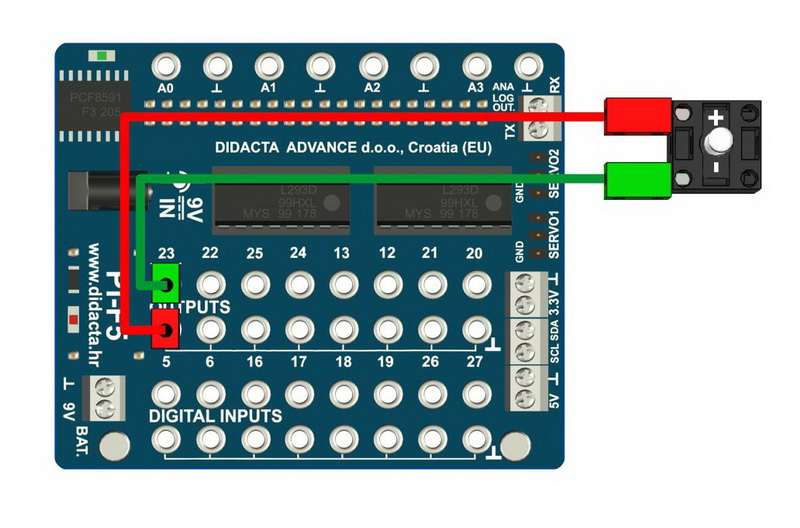
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||