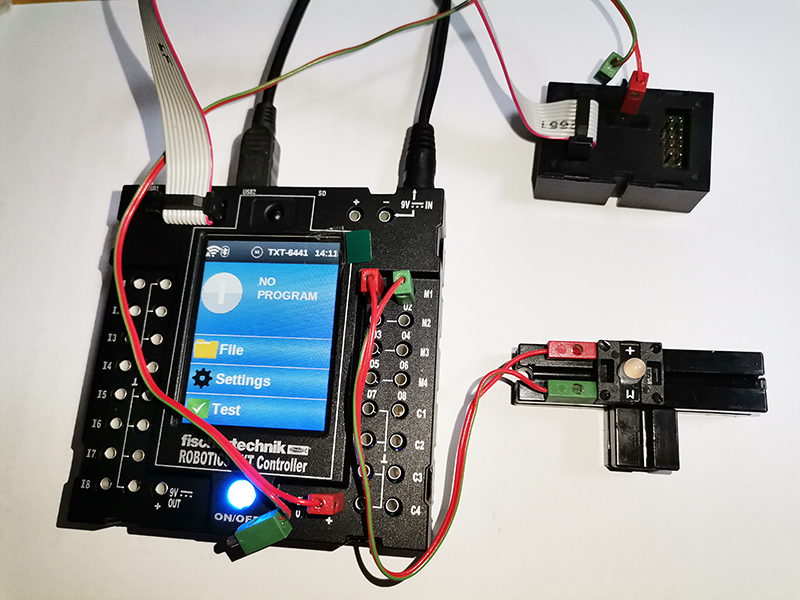
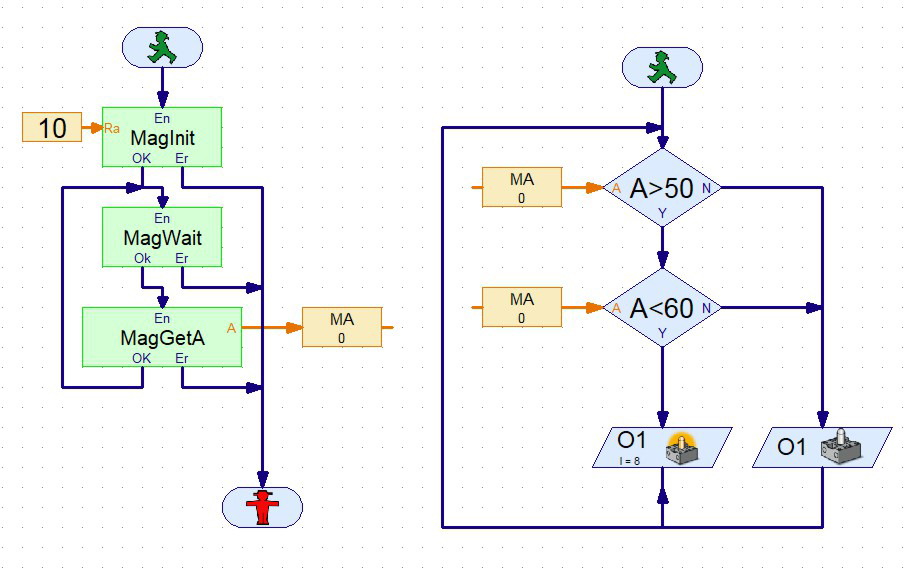
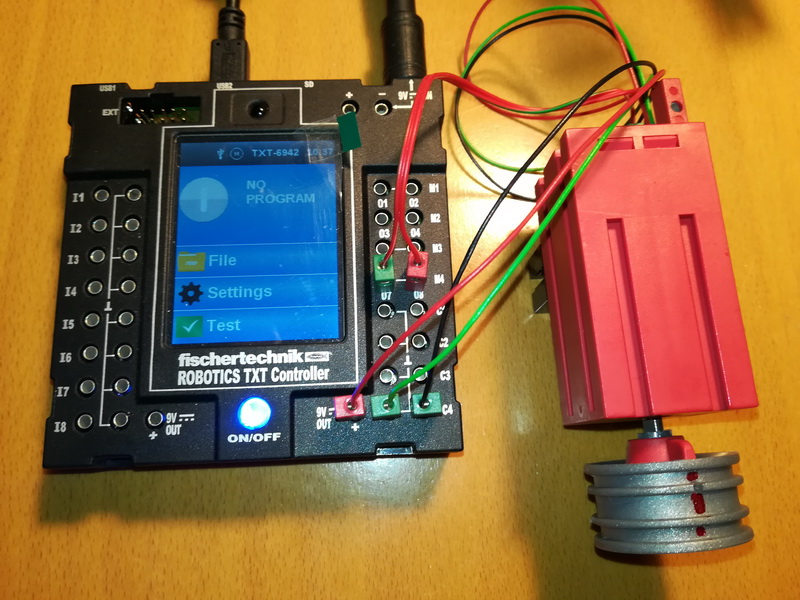
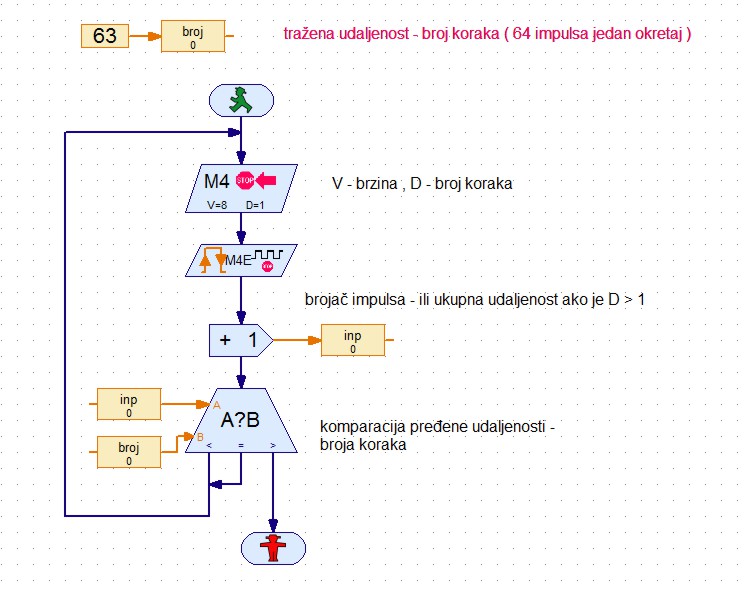
| ŠKOLA PROGRAMIRANJA | RoboPRO programi za TXT - TX sučelje |
| 1. | KOMBI SENZOR - JEDNOSTAVNI KOMPAS | 15. | FOTO SENZOR - ANALOGNO (1) | ||||||
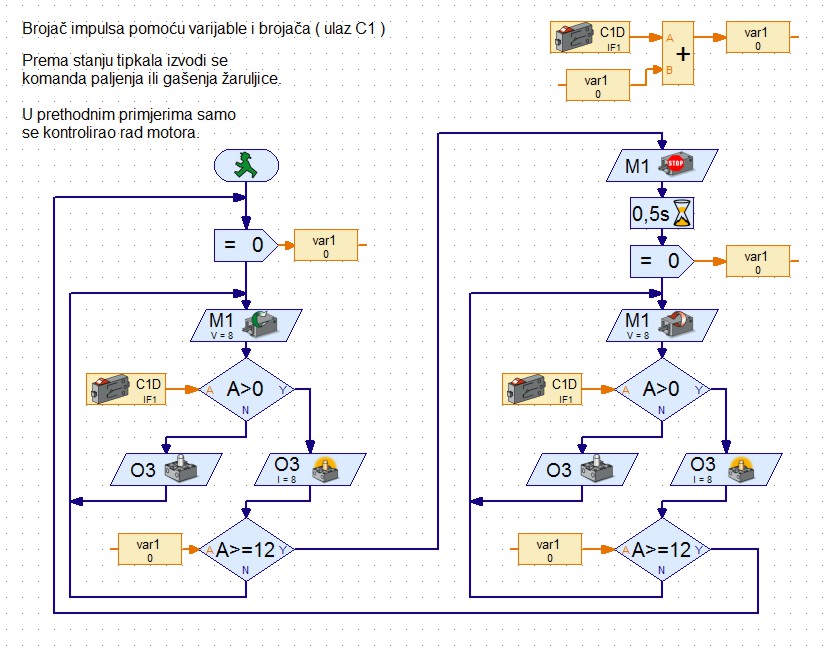
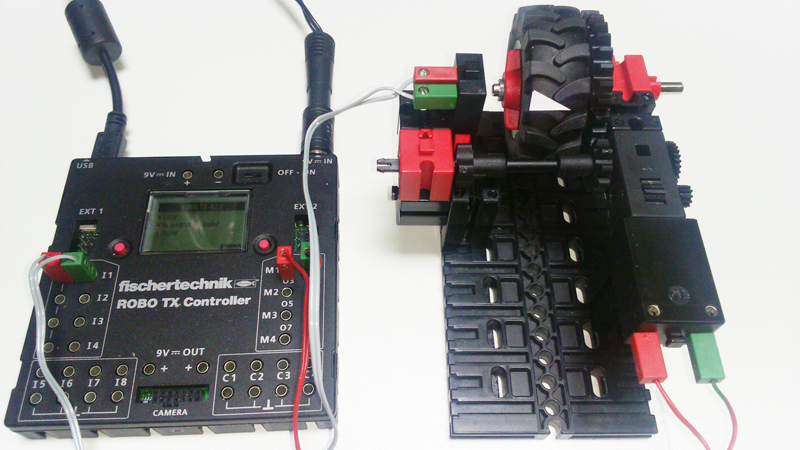
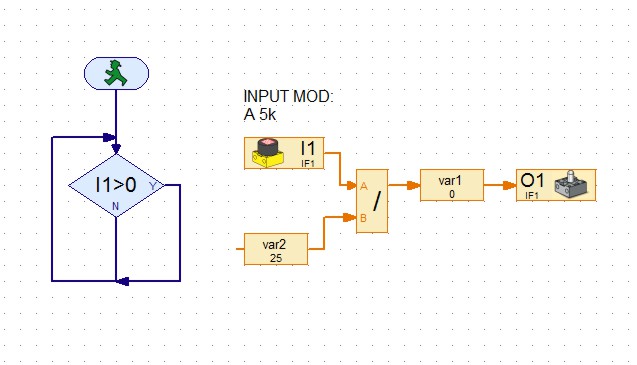
| 2. | ENKODER MOTOR - BROJANAJE IMPULSA | 16. | IR SENZOR FISCHERTECHNIK - CRTA (3) - KONTROLA MOTORA | ||||||
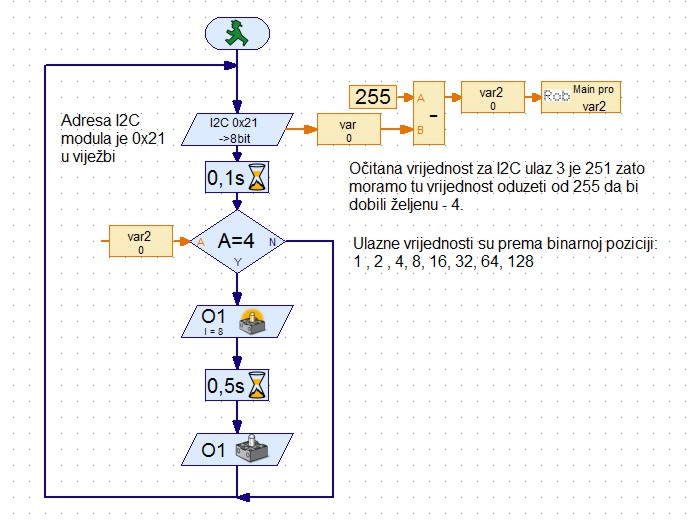
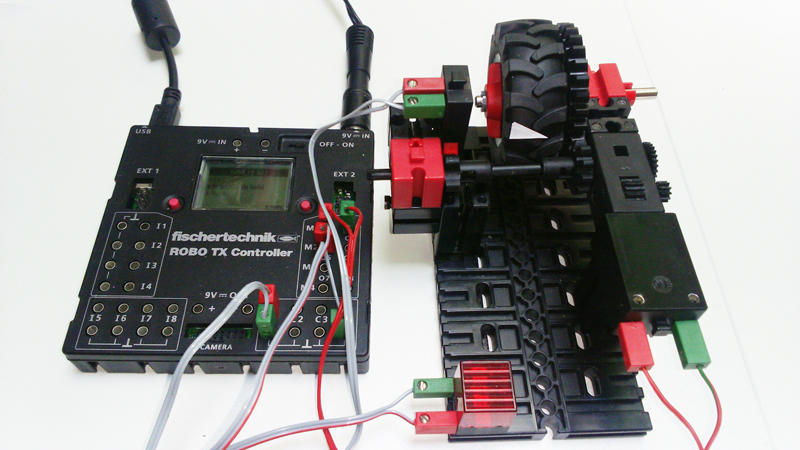
| 3. | I2C modul - kontrola digitalnih senzora - SAMO TX sučelje | 17. | IR SENZOR FISCHERTECHNIK - CRTA (2) | ||||||
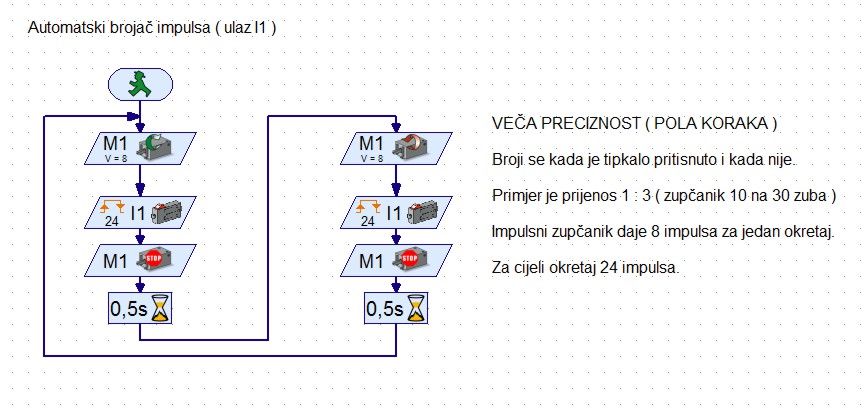
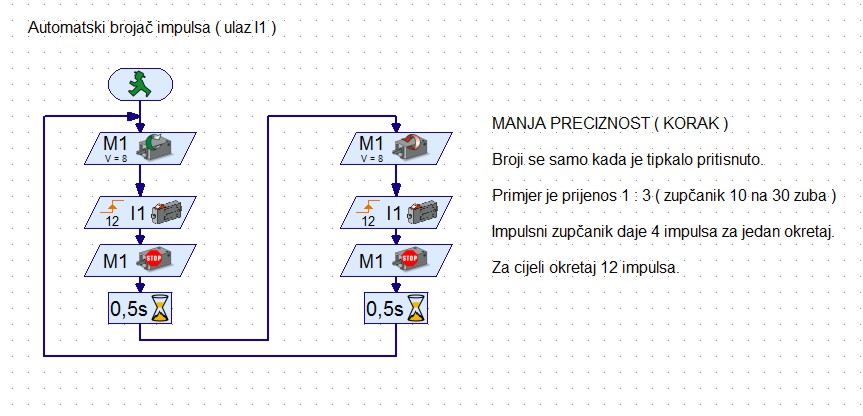
| 4. | Kontrola radnje ( kotača ) INPULSNIM zupčanikom (FT037157)(3) | 18. | IR SENZOR FISCHERTECHNIK - CRTA (1) | ||||||
| 5. | Kontrola okretanja kotača INPULSNIM zupčanikom (FT037157)(2) | 19. | FOTO SENZOR (TRANZISTOR) (2) | ||||||
| 6. | Kontrola okretanja kotača INPULSNIM zupčanikom (FT037157)(1) | 20. | FOTO SENZOR (TRANZISTOR) (1) | ||||||
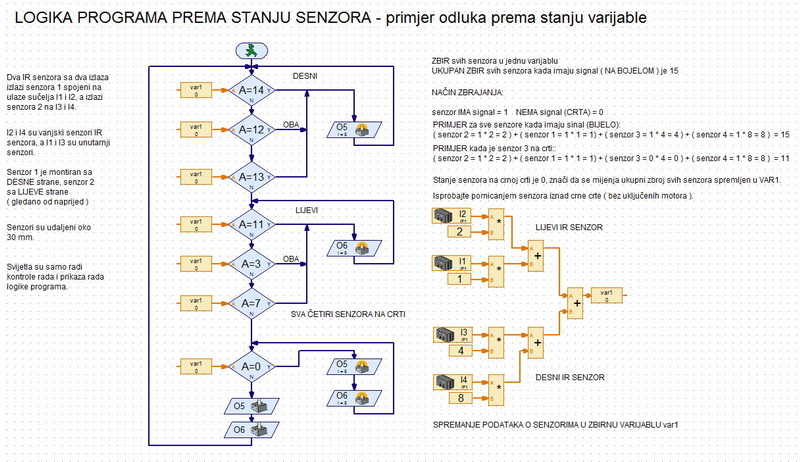
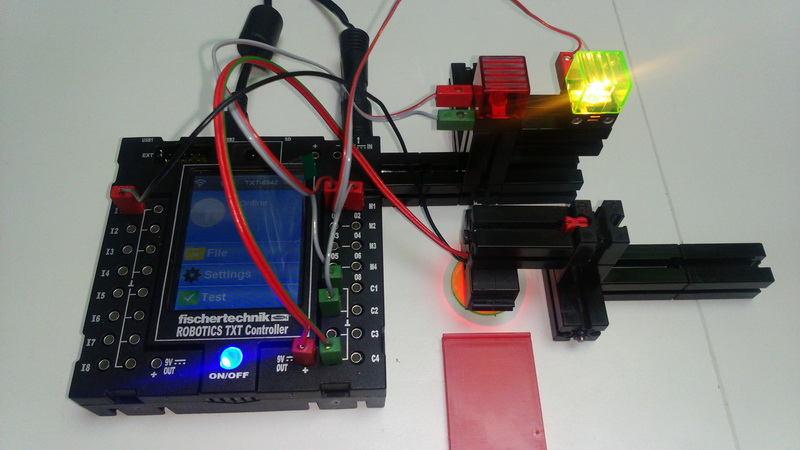
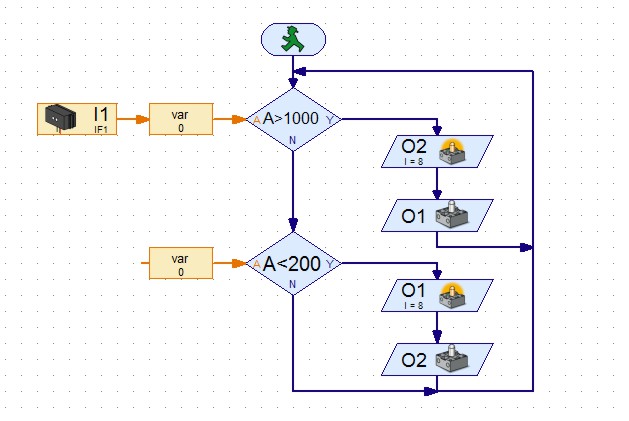
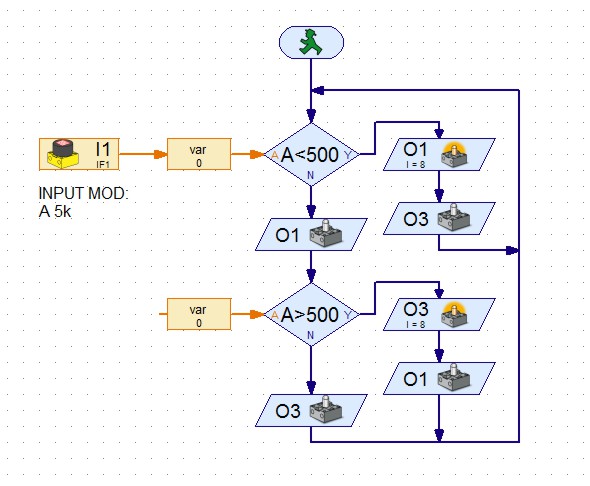
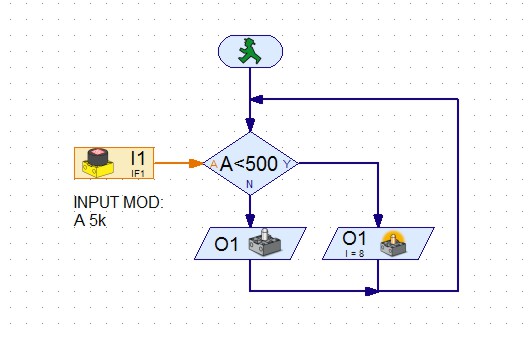
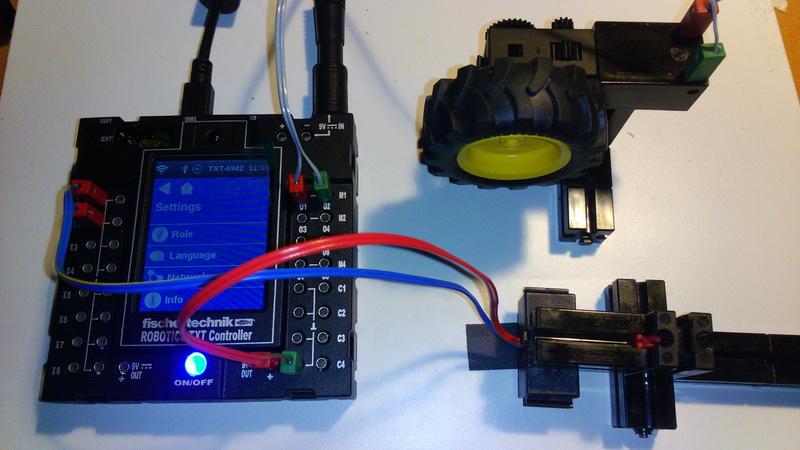
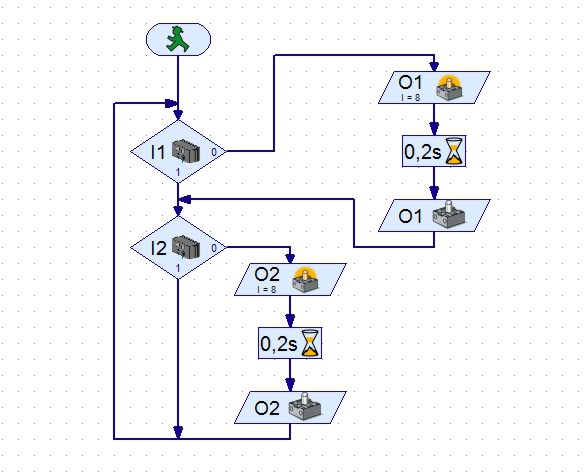
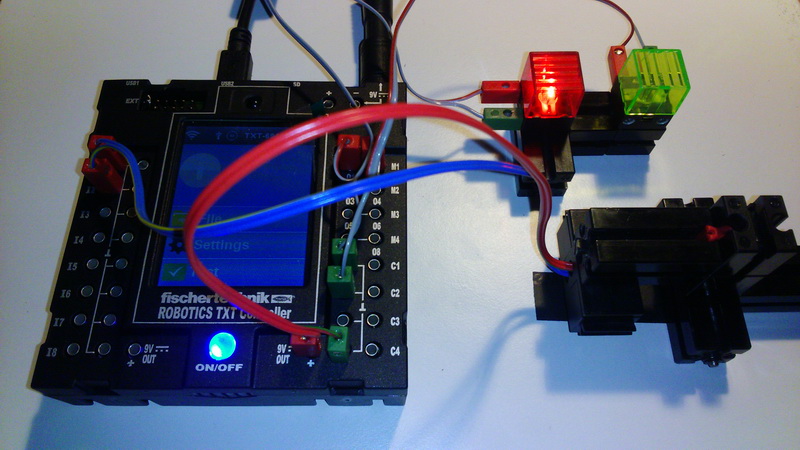
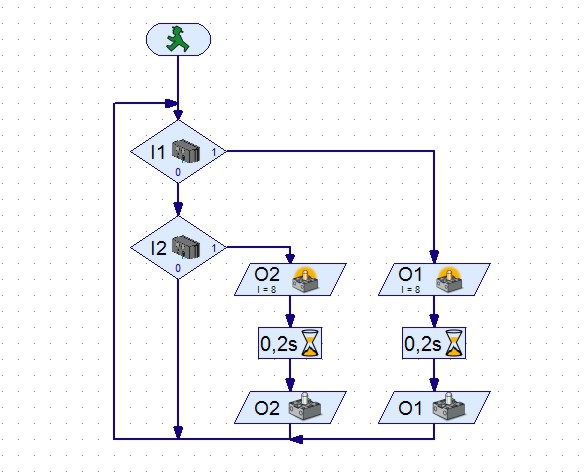
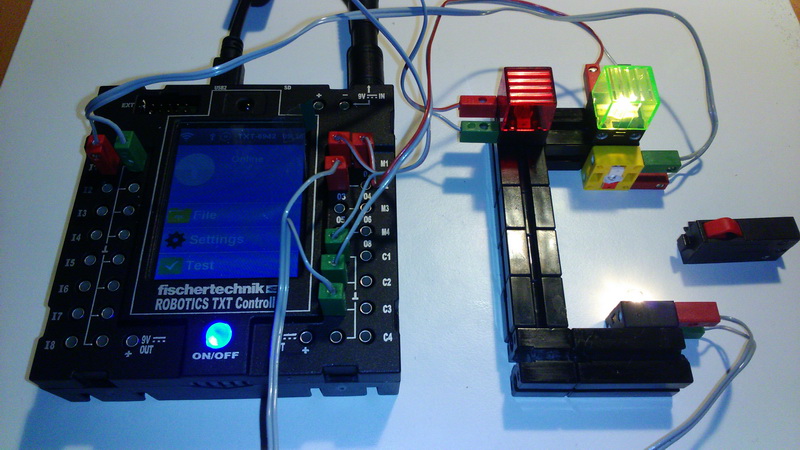
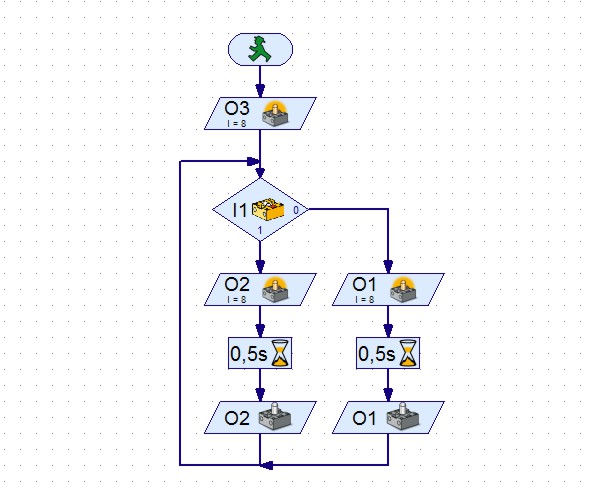
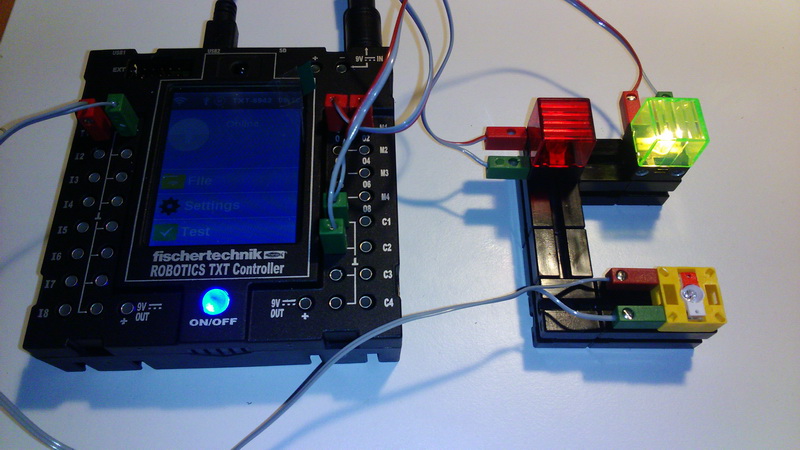
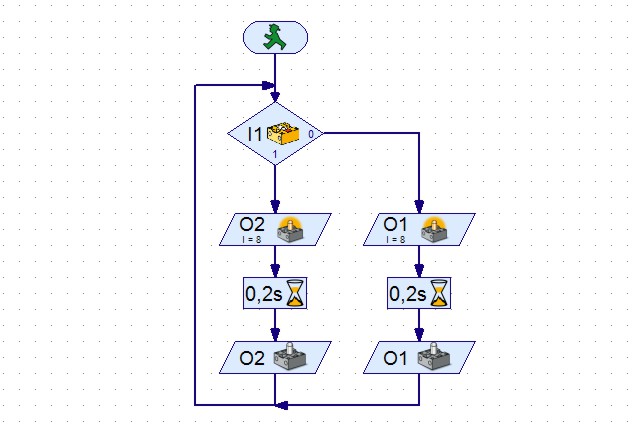
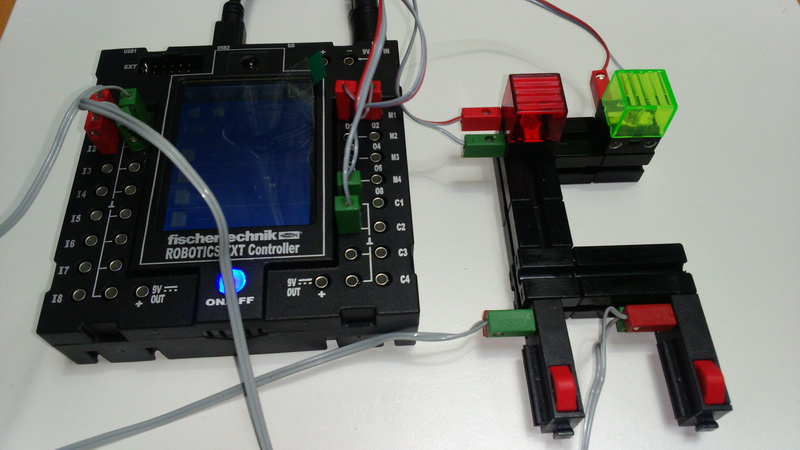
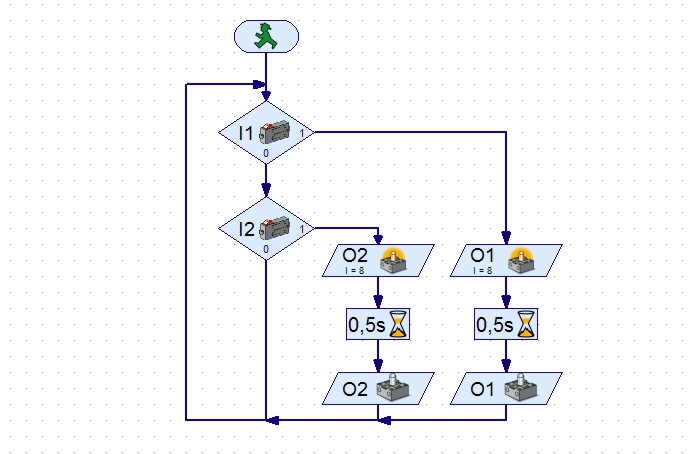
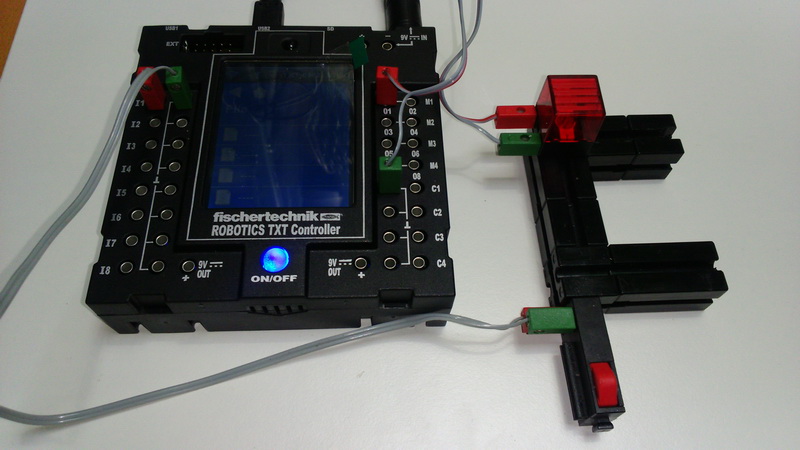
| 7. | LOGIKA GRANANJA ZBIRNOM VARIJABLOM STANJA SENZORA - VOŽNJA PO CRTI - jednostavan primjer | 21. | KONTROLA ŽARULJICA TIPKALIMA | ||||||
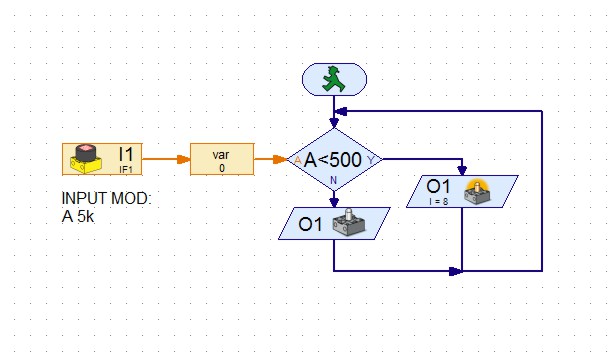
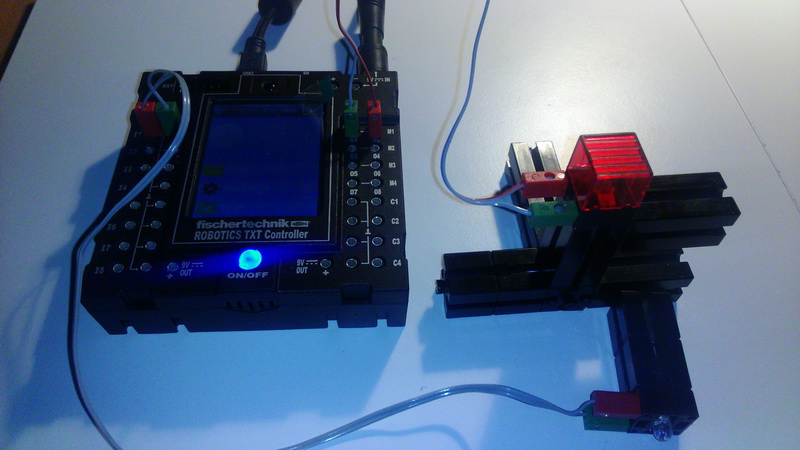
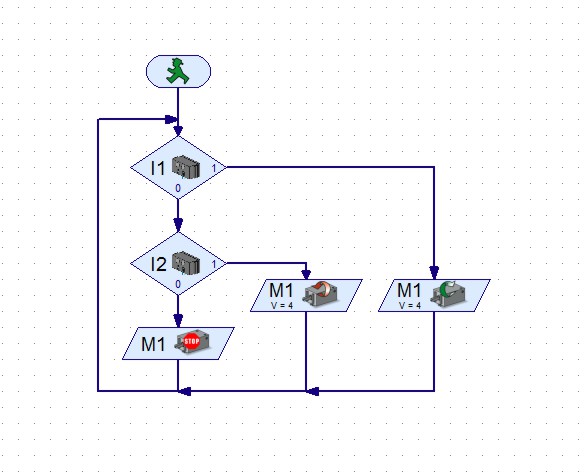
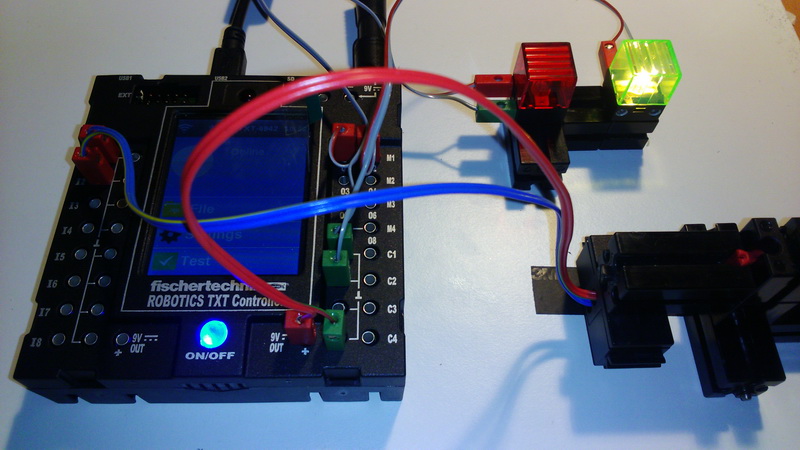
| 8. | LOGIKA GRANANJA ZBIRNOM VARIJABLOM STANJA SENZORA - jednostavan primjer | 22. | KONTROLA ŽARULJICE TIPKALOM | ||||||
| 9. | KOLOR SENZOR (2) | 23. | KONTROLA DC MOTORA | ||||||
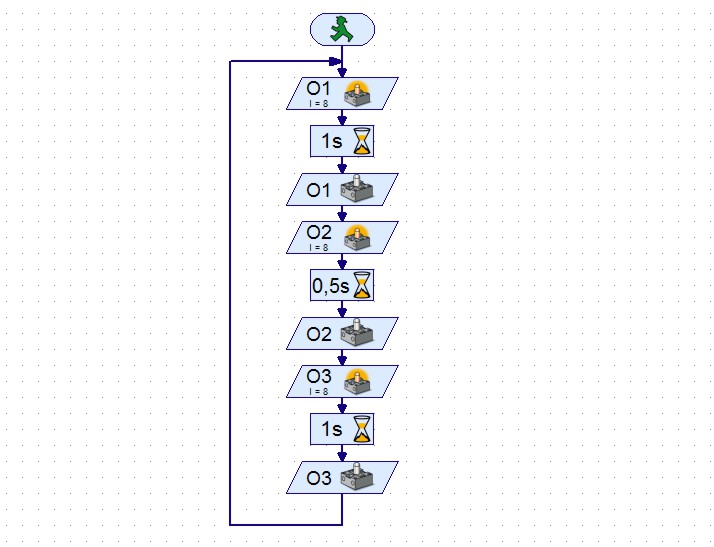
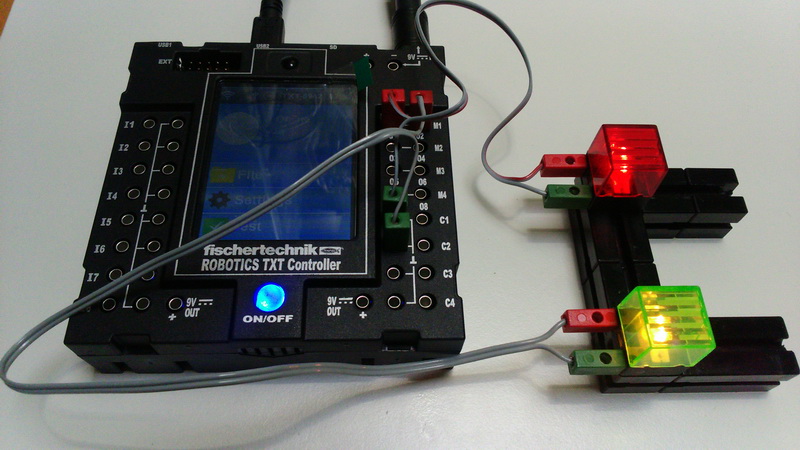
| 10. | KOLOR SENZOR (1) | 24. | KONTROLA TRI ŽARULJICE - SEMAFOR | ||||||
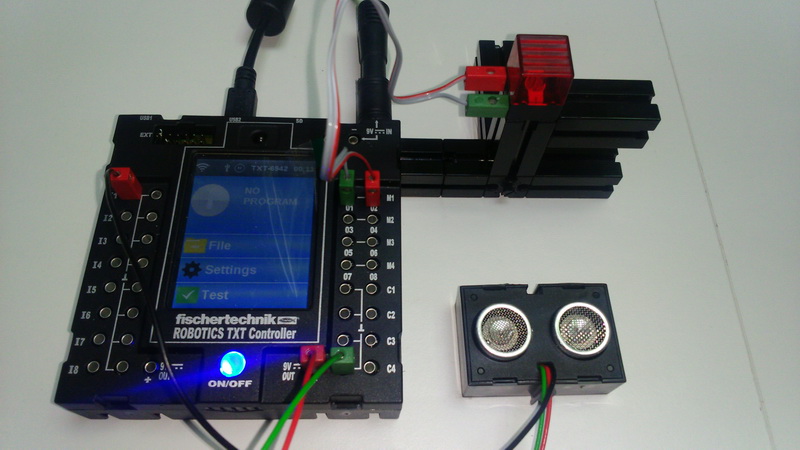
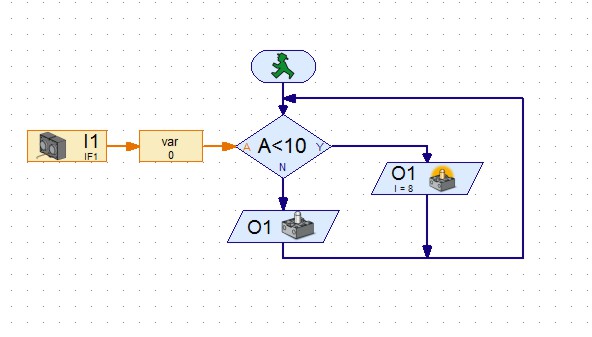
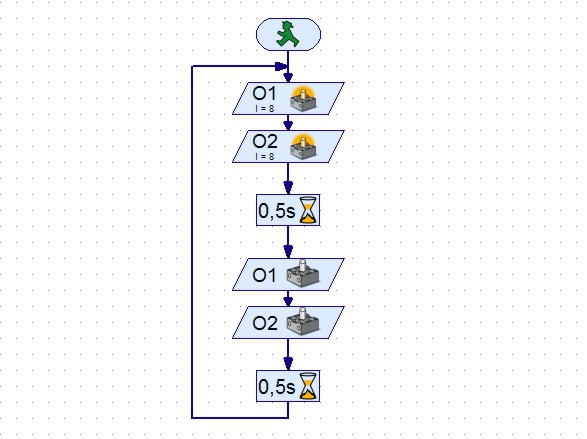
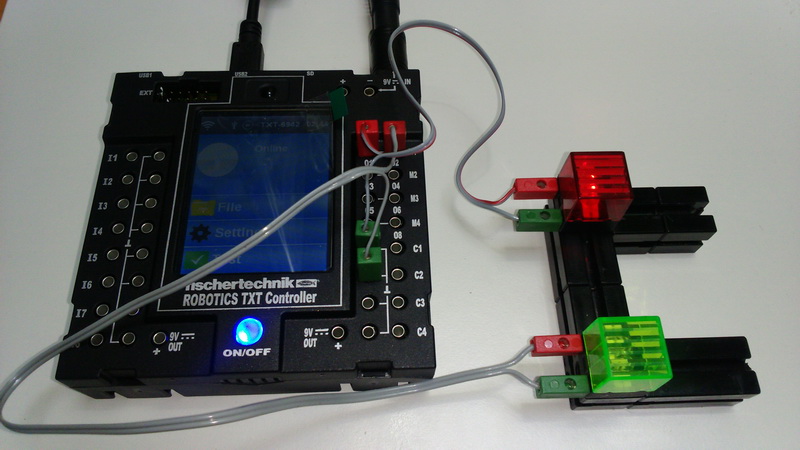
| 11. | ULTRAZVUČNI SENZOR | 25. | KONTROLA DVIJE ŽARULJICE | ||||||
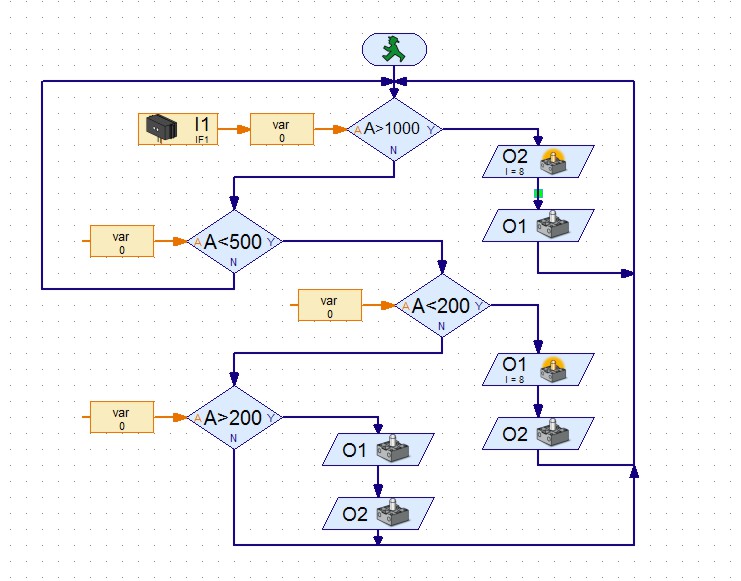
| 12. | FOTO SENZOR - ANALOGNO (4) | 26. | KONTROLA DVIJE ŽARULJICE | ||||||
| 13. | FOTO SENZOR - ANALOGNO (3) | 27. | KONTROLA ŽARULJICE | ||||||
| 14. | FOTO SENZOR - ANALOGNO (2) | ||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||