| ŠKOLA PROGRAMIRANJA | MakeCode programi za micro:bit sučelje |
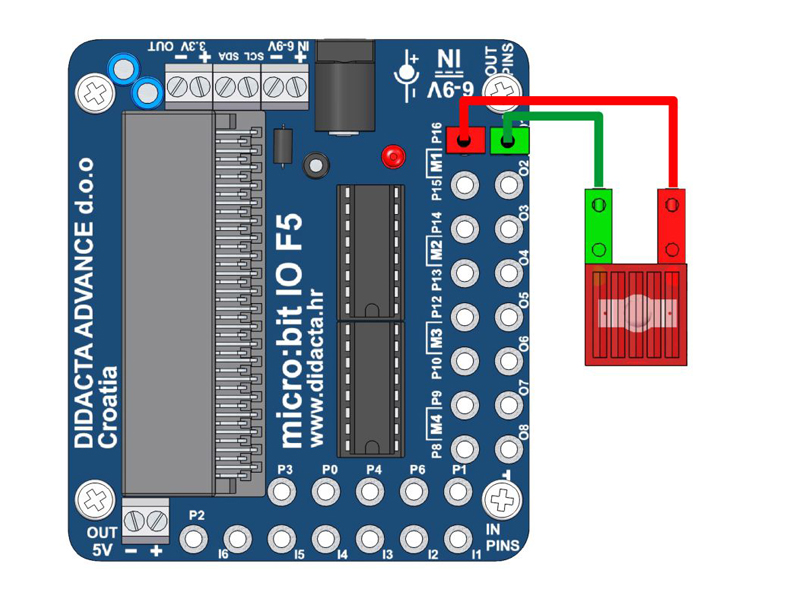
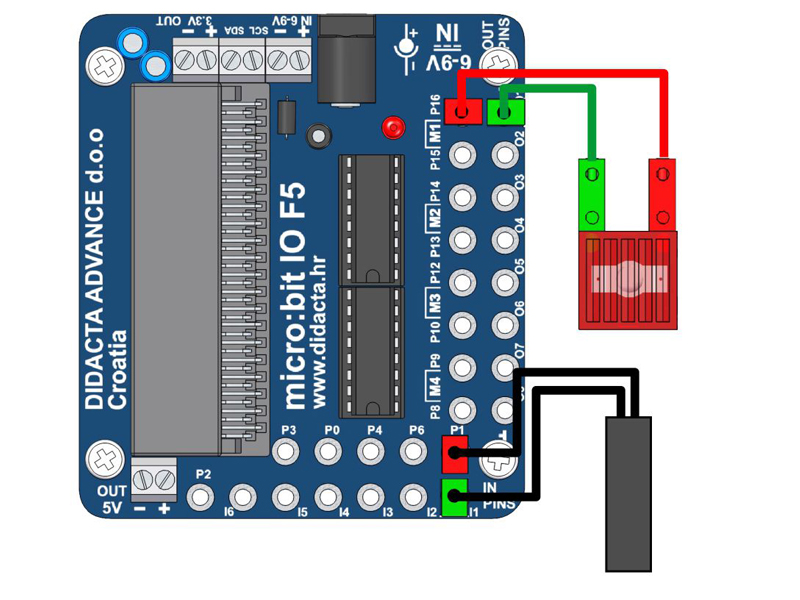
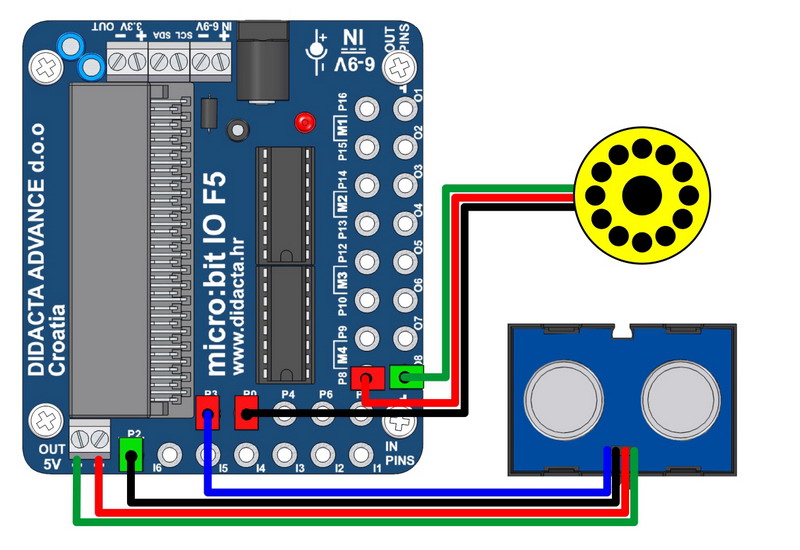
| 1. | KONTROLA ŽARULJICE / LED | 14. | MJERENJE UDALJENOSTI ULTRAZVUČNIM SENZOROM - prikaz kao GRAF | ||||||
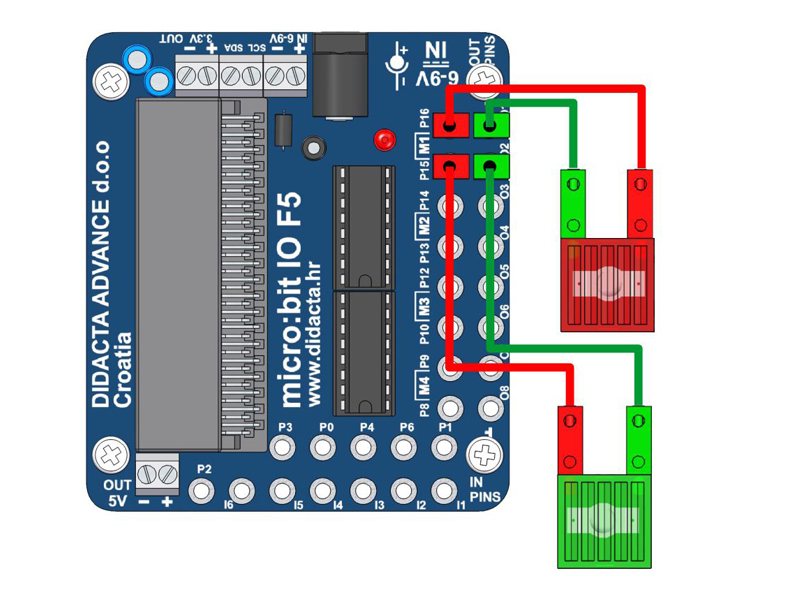
| 2. | KONTROLA DVIJE ŽARULJICE | 15. | MJERENJE UDALJENOSTI ULTRAZVUČNIM SENZOROM - prikaz vrijednosti | ||||||
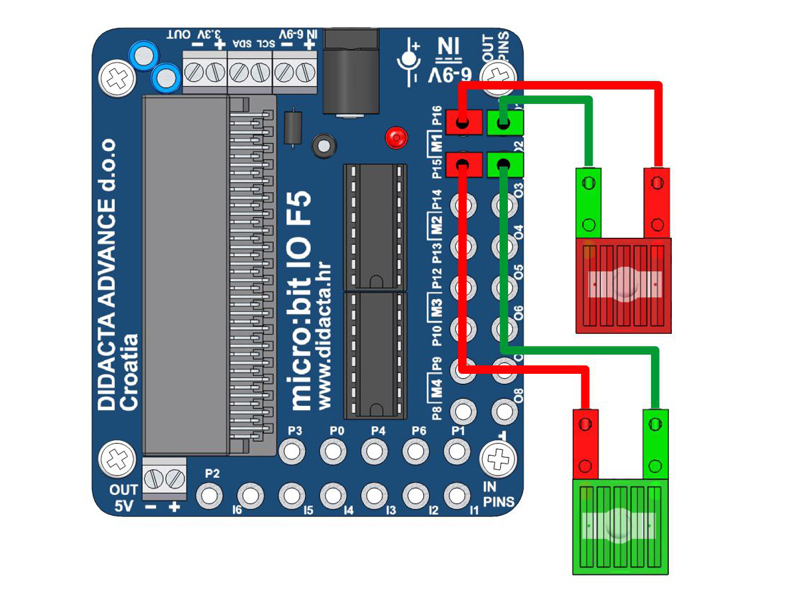
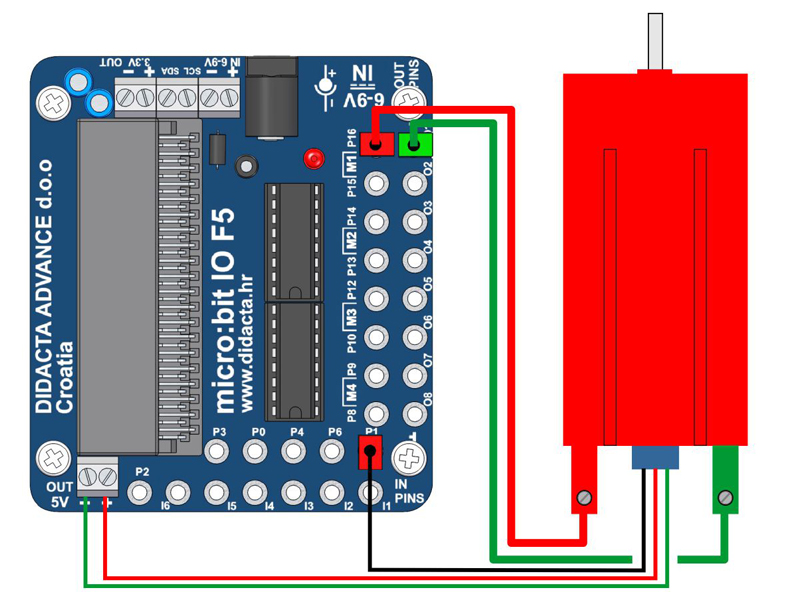
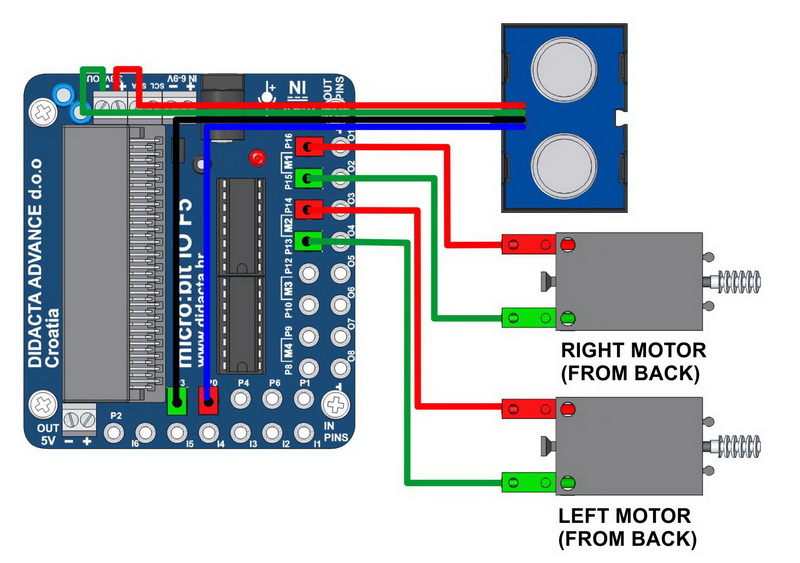
| 3. | KONTROLA DVIJE ŽARULJICE PUTEM A I B TIPKE | 16. | Kontrola 2 x DC motora - analogno | ||||||
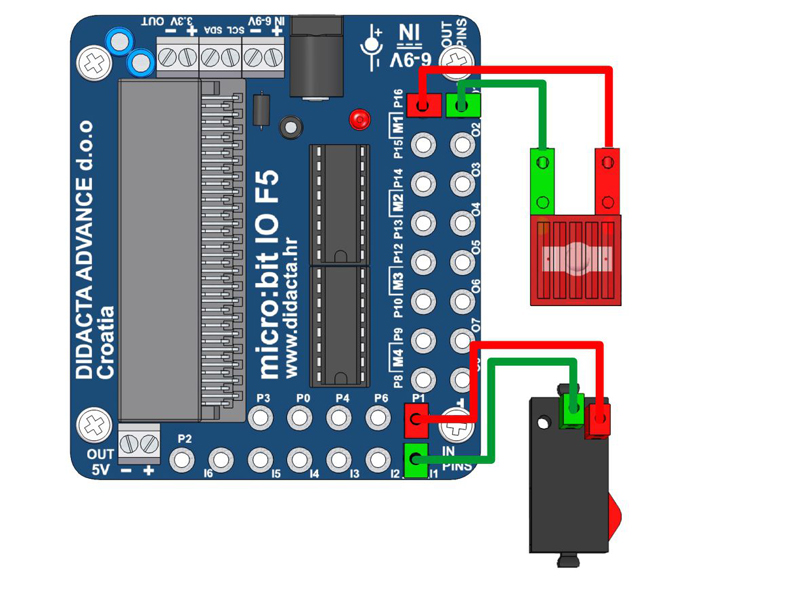
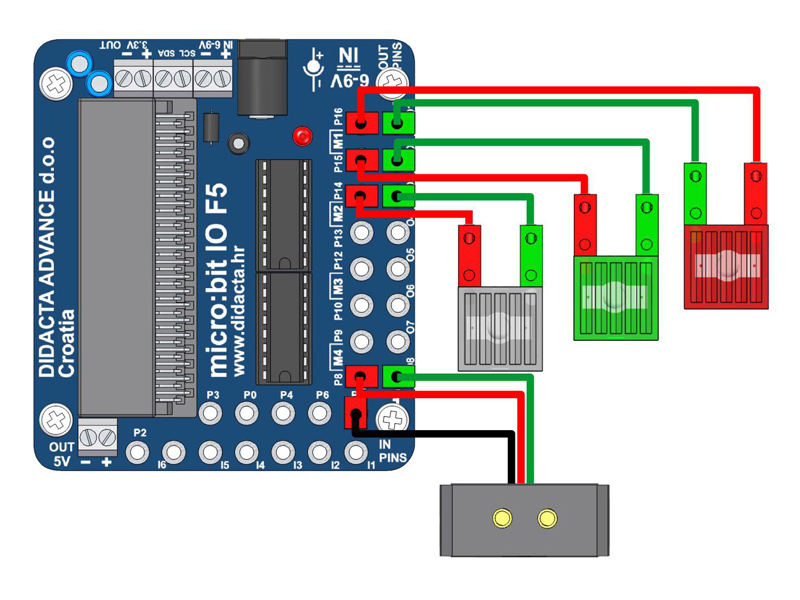
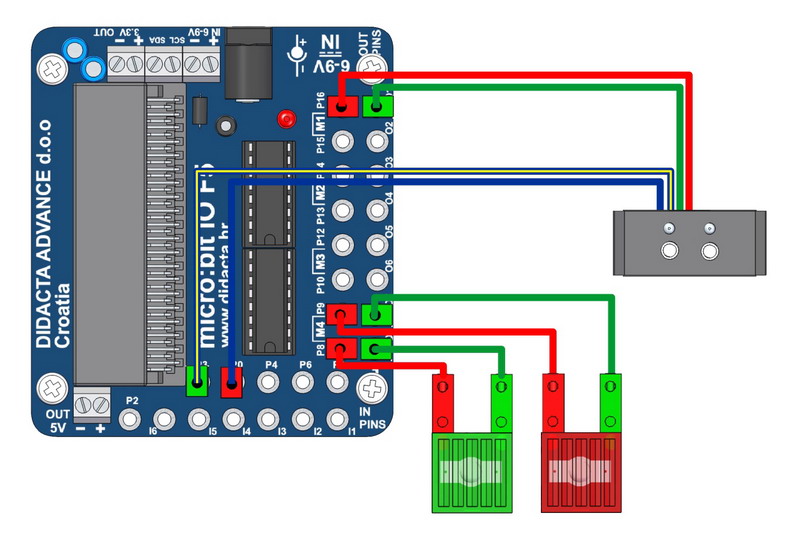
| 4. | KONTROLA ŽARULJICE - TIPKALOM (DIGITALNO) | 17. | Kontrola 4 x DC motora - analogno - digitalno | ||||||
| 5. | KONTROLA ŽARULJICE - FOTO senzorom (DIGITALNO) 2 | 18. | IR senzor | ||||||
| 6. | KONTROLA ŽARULJICE - FOTO senzorom (DIGITALNO) 3 | 19. | ENKODER MOTOR - KONTROLA PUTEM BROJAČA | ||||||
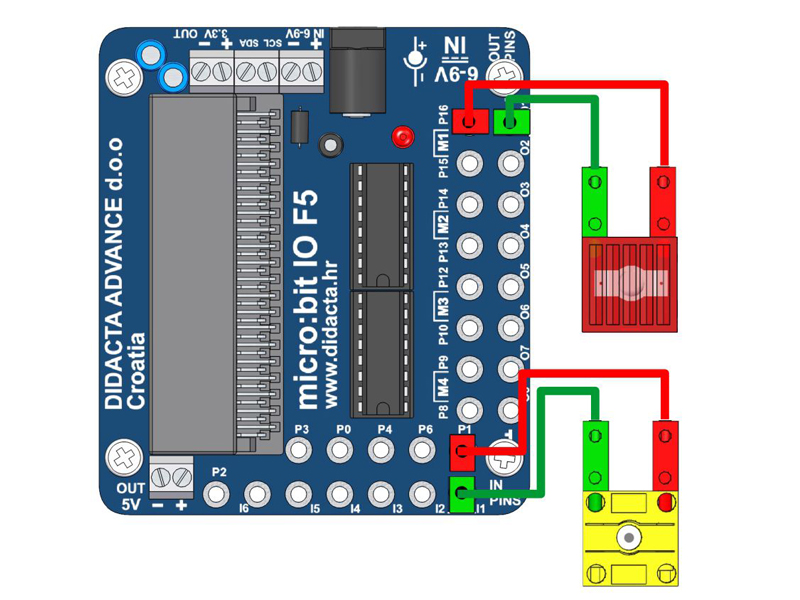
| 7. | KONTROLA ŽARULJICE - MEGANETSKI senzor (DIGITALNO) 4 | 20. | ULTRAZVUČNI SENZOR (3.3V) - random kontrola vozila ( izmjena ) | ||||||
| 8. | KONTROLA ŽARULJICE - FOTO senzorom (ANALOGNO) | 21. | ULTRAZVUČNI senzor - stvaramo muziku | ||||||
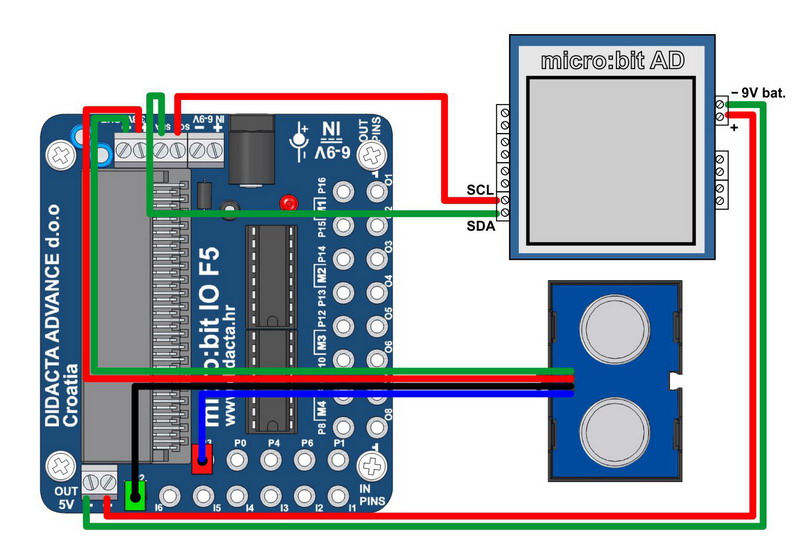
| 9. | KONTROLA ŽARULJICE - FOTO senzorom (ANALOGNO) - OČITANJE CRNE CRTE | 22. | PRIKAZ VRIJEDNOSTI (IO F5 + micro:bit AD ) | ||||||
| 10. | COLOR SENZOR (FischerTechnik) - PREPOZNAVANJE BOJA | 23. | KORAČNI MOTOR (BIPOLAR) - KORAK | ||||||
| 11. | MOTOR - KONTROLA SMJERA OKRETANJA TIPKAMA "A" I "B" | 24. | KORAČNI MOTOR (BIPOLAR) - POLUKORAK | ||||||
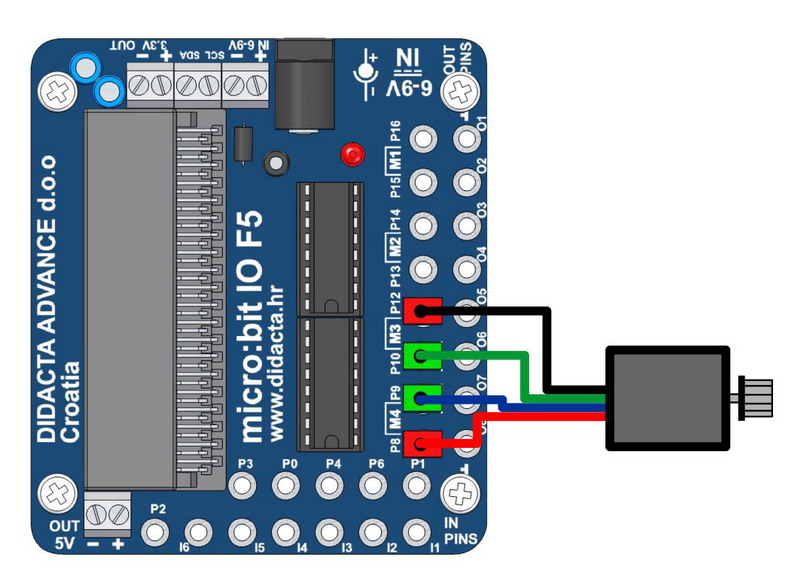
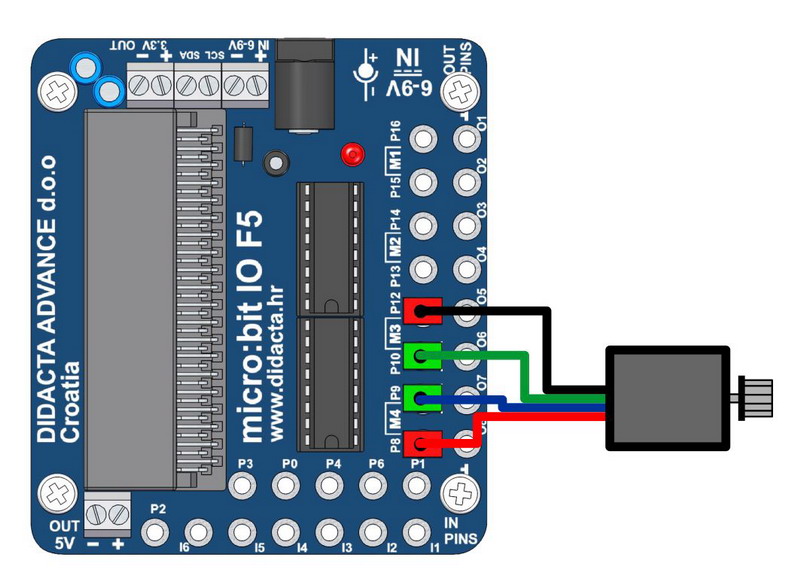
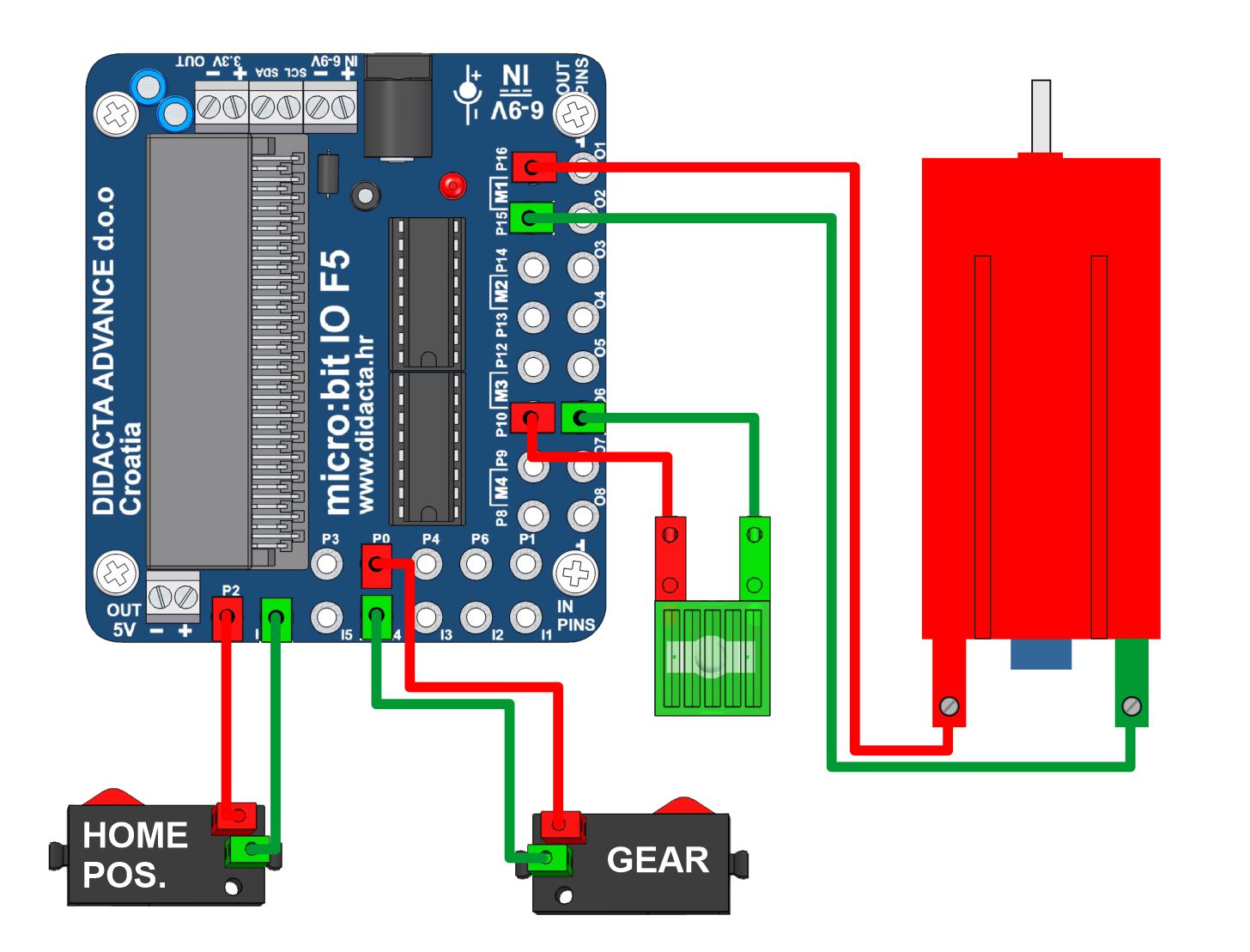
| 12. | SERVO MOTOR | 25. | POZICIONIRANJE NOSAČA ROBOTSKE RUKE | ||||||
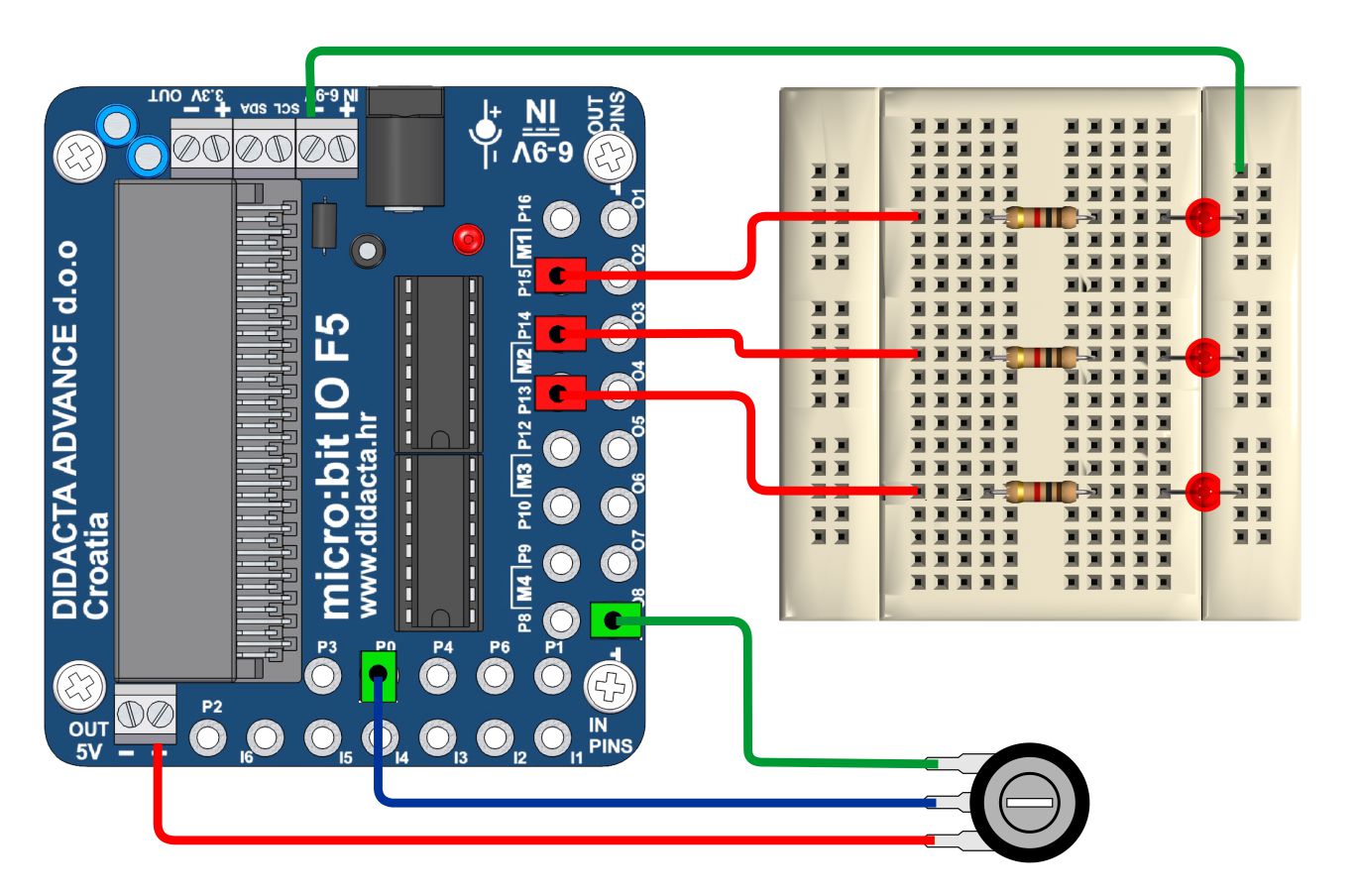
| 13. | Kontrola LED dioda putem potenciometra | ||||||||
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||